| 번호 | 청구항 |
|---|---|
| 1 | 긴급구조 신호가 발생한 지점으로 추정된 광역 검출영역에서 상기 긴급구조 신호를 송신한 목표 지점을 추적하는 긴급 구조 방법에 있어서, 상기 광역 검출영역 내에서 상기 신호 발생기를 활성화하는 단계; 상기 광역 검출영역 내에서 상기 긴급구조 신호를 수신하는 단계; 상기 긴급구조 신호를 바탕으로 상기 목표 지점이 존재 가능한 후보 검출영역을 설정하는 단계; 상기 후보 검출영역의 범위와 기 설정된 오차 범위를 나타내는 기준값을 비교하는 단계; 및 상기 목표 지점을 확정하는 단계; 를 포함하는 긴급 구조 방법. |
| 2 | 제1항에 있어서, 상기 후보 검출영역을 설정하는 단계는 현재 위치에서 상기 긴급구조 신호를 수신하여 상기 목표지점을 가정할 수 있는 적어도 하나이상의 후보지점을 선택하는 단계인 것을 특징으로 하는 긴급 구조 방법. |
| 3 | 제2항에 있어서, 상기 후보지점은 상기 수신된 긴급구조 신호에서 기 설정된 신호의 크기보다 큰 신호가 수신된 방향에 존재하는 것을 특징으로 하는 긴급 구조 방법. |
| 4 | 제1항에 있어서, 상기 기준값을 비교하는 단계는 상기 후보 검출영역의 범위가 상기 기준값보다 크면, 현재 위치에서 새로운 위치로 이동하여 상기 긴급구조 신호를 재수신하는 단계; 상기 새로운 위치에서 상기 후보 검출영역을 재설정하는 단계; 및 상기 재설정된 후보 검출영역과 기존의 상기 후보 검출영역과의 교차영역을 검출하는 단계; 를 포함하는 것을 특징으로 하는 긴급 구조 방법. |
| 5 | 제1항에 있어서, 상기 기준값을 비교하는 단계는 상기 후보 검출영역의 범위가 상기 기준값보다 작으면, 상기 후보 검출영역 내에 상기 목표 지점이 위치한다고 확정하는 단계를 포함하는 것을 특징으로 하는 긴급 구조 방법. |
| 6 | 제1항에 있어서, 상기 후보 검출영역이 오차 범위 내에 들어오면, 상기 후보 영역에서 자동으로 상기 목표 지점까지 최단 경로 찾기를 통해 이동하는 것을 특징으로 하는 긴급 구조 방법. |
| 7 | 제4항에 있어서, 상기 새로운 위치는 상기 긴급구조 신호 중 신호의 세기가 가장 큰 방향에 존재하는 것을 특징으로 하는 긴급 구조 방법. |
| 8 | 제2항에 있어서, 상기 후보 검출영역을 설정하는 단계는 지도 데이터를 보충하여 설정하는 단계를 더 포함하는 것을 특징으로 하는 긴급 구조 방법. |
| 9 | 위치알림기로부터 송출된 긴급구조 신호를 중계기를 통해 수신하는 단계; 상기 긴급구조 신호가 발생한 목표 지점을 포함한 광역 검출영역을 추정하는 단계; 상기 광역 검출영역으로 이동하는 단계; 상기 위치알림기를 활성화하는 활성 신호를 송신하는 단계; 상기 위치알림기로부터 긴급구조 신호를 직접 수신하는 단계; 상기 긴급구조 신호를 수신하여 상기 목표 지점으로 가정할 수 있는 적어도 하나이상의 후보지점을 추정하는 단계; 현재 위치에서 상기 후보지점을 포함하는 제1 후보 검출영역을 설정하는 단계; 상기 제1 후보 검출영역에서 상기 긴급구조 신호중 신호의 세기가 가장 큰 신호가 발생한 방향으로 새로운 위치를 설정하는 단계; 상기 새로운 위치로 이동하는 단계; 상기 새로운 위치에서 상기 후보지점으로 오차 범위를 포함하는 제2 후보 검출영역을 설정하는 단계; 및 상기 제2 후보 검출영역의 범위와 기 설정된 기준값을 비교하는 단계; 상기 제2 후보 검출영역의 범위가 상기 기준값보다 작으면 해당 영역 내에 상기 목표 지점이 위치한다고 확정하는 것을 특징으로 하는 하는 긴급 구조 방법. |
| 10 | 제9항에 있어서, 상기 광역 검출영역에서 상기 위치알림기를 활성화하는 활성 신호는 무지향 안테나를 통해 송신하고, 상기 긴급구조 신호의 측정은 지향성 안테나를 통해 이루어지는 것을 특징으로 하는 긴급 구조 방법. |
| 11 | 제9항에 있어서, 상기 후보지점은 상기 수신된 긴급구조 신호 중 신호의 크기가 가장 센 방향에 위치한 지점인 것을 특징으로 하는 긴급 구조 방법. |
| 12 | 제9항에 있어서, 상기 기 설정된 기준값과 비교하는 단계는 상기 제2 후보 검출영역의 범위가 상기 기준값보다 크면, 상기 긴급구조 신호를 재수신하는 단계; 상기 새로운 위치에서 상기 후보 검출영역을 재설정하는 단계; 및 상기 재설정된 후보 검출영역과 기존의 후보 검출영역과의 교차영역을 검출하는 단계; 를 포함하는 것을 특징으로 하는 긴급 구조 방법. |
| 13 | 제9항에 있어서, 상기 후보지점을 설정하는 단계는 지도 데이터를 보충하여 설정하는 단계를 더 포함하는 것을 특징으로 하는 긴급 구조 방법. |
| 14 | 긴급구조를 요청하는 구조 요청자의 위치를 추적하는 긴급 구조 시스템에 있어서, 상기 구조 요청자가 구비하며, 긴급구조 신호를 발생하는 위치알림기; 상기 긴급구조 신호를 수신받아 상기 구조 요청자의 위치를 포함하는 광역 검출영역으로 구조대를 투입하는 중앙 서비스 센터; 상기 구조대에 구비되어 상기 위치알림기로부터 상기 구조 요청자의 위치를 알려주는 위치 알림신호를 발생하도록 하기 위해 활성신호를 송신하는 위치검출기; 및 상기 위치 알림신호를 수신받아 상기 위치 알림신호의 크기 및 방향을 검출하는 제어부; 를 포함하고, 상기 구조대는 상기 제어부에 의해 검출된 상기 위치 알림신호 중 가장 큰 세기를 가지는 방향으로 이동하여 상기 구조 요청자의 위치를 추적하는 것을 특징으로 하는 긴급 구조 시스템. |
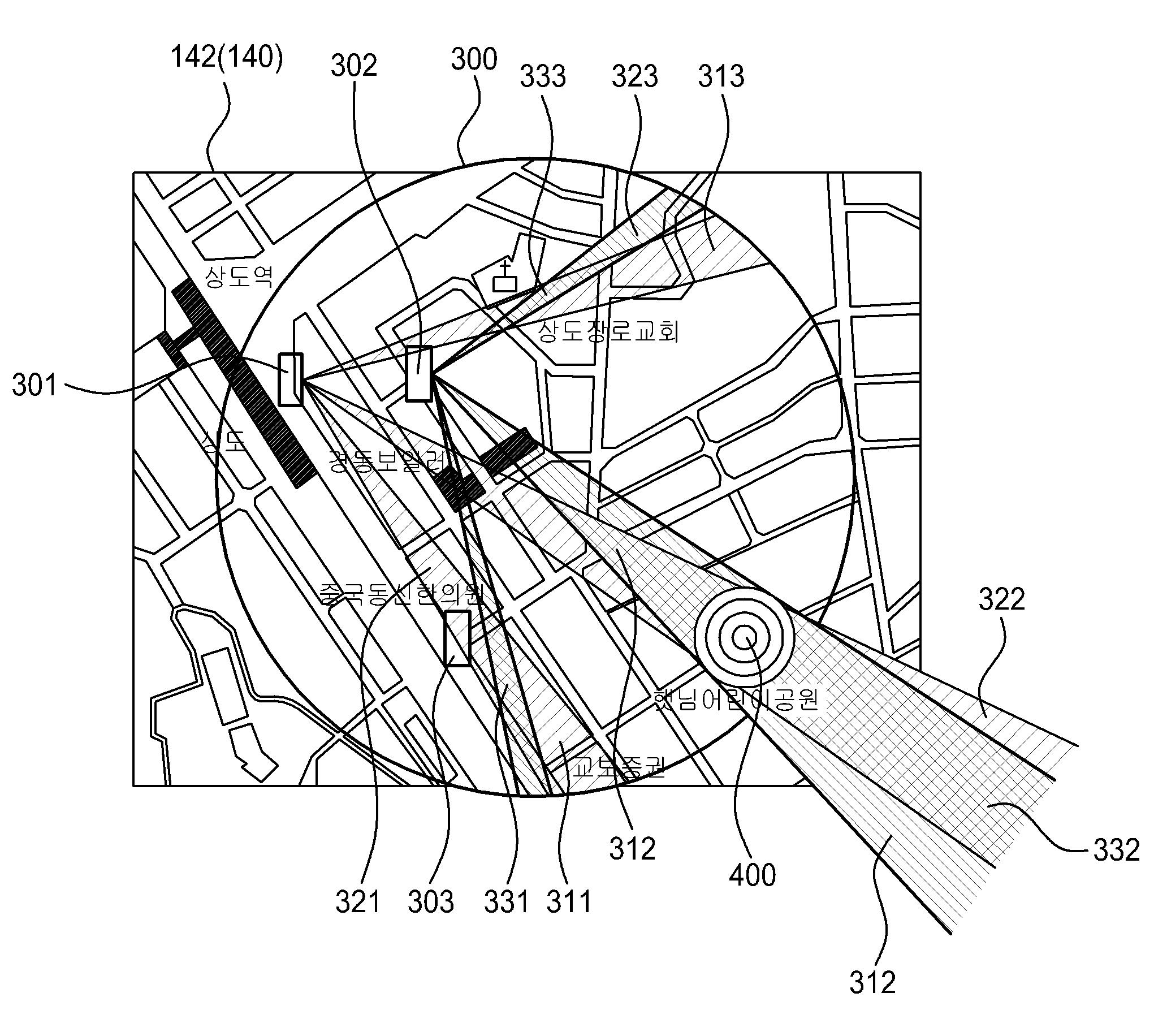
| 15 | 제14항에 있어서, 상기 제어부는 상기 위치알림기가 위치한 지역을 표시하는 맵 디스플레이부를 포함하며, 상기 맵 디스플레이부는 상기 위치 알림신호를 기초로하여 상기 구조 요청자의 위치로 가정할 수 있는 적어도 하나 이상의 후보지점을 표시하는 것을 특징으로 하는 긴급 구조 시스템. |
| 16 | 제15항에 있어서, 상기 맵 디스플레이에는 상기 구조대의 위치로부터 상기 후보지점을 포함하는 영역인 후보 검출영역을 표시하는 것을 특징으로 하는 긴급 구조 시스템. |
| 17 | 제15항에 있어서, 상기 후보 검출영역은 상기 구조대가 이동함에 따라 크기가 변화되고, 변화되는 각각의 후보 검출영역들이 교차되어 형성하는 교차영역 중 최종적으로 남게 되는 영역에 상기 구조 요청자의 위치가 존재하는 것을 특징으로 하는 긴급 구조 시스템. |
| 18 | 제14항에 있어서, 상기 긴급구조 신호를 상기 중앙 서비스 센터로 송신하는 중계기를 더 포함하는 것을 특징으로 하는 긴급 구조 시스템. |
| 19 | 제14항에 있어서, 상기 위치검출기는 상기 활성신호를 송신하는 무지향 안테나를 포함하는 것을 특징으로 하는 긴급 구조 시스템. |