| 번호 | 청구항 |
|---|---|
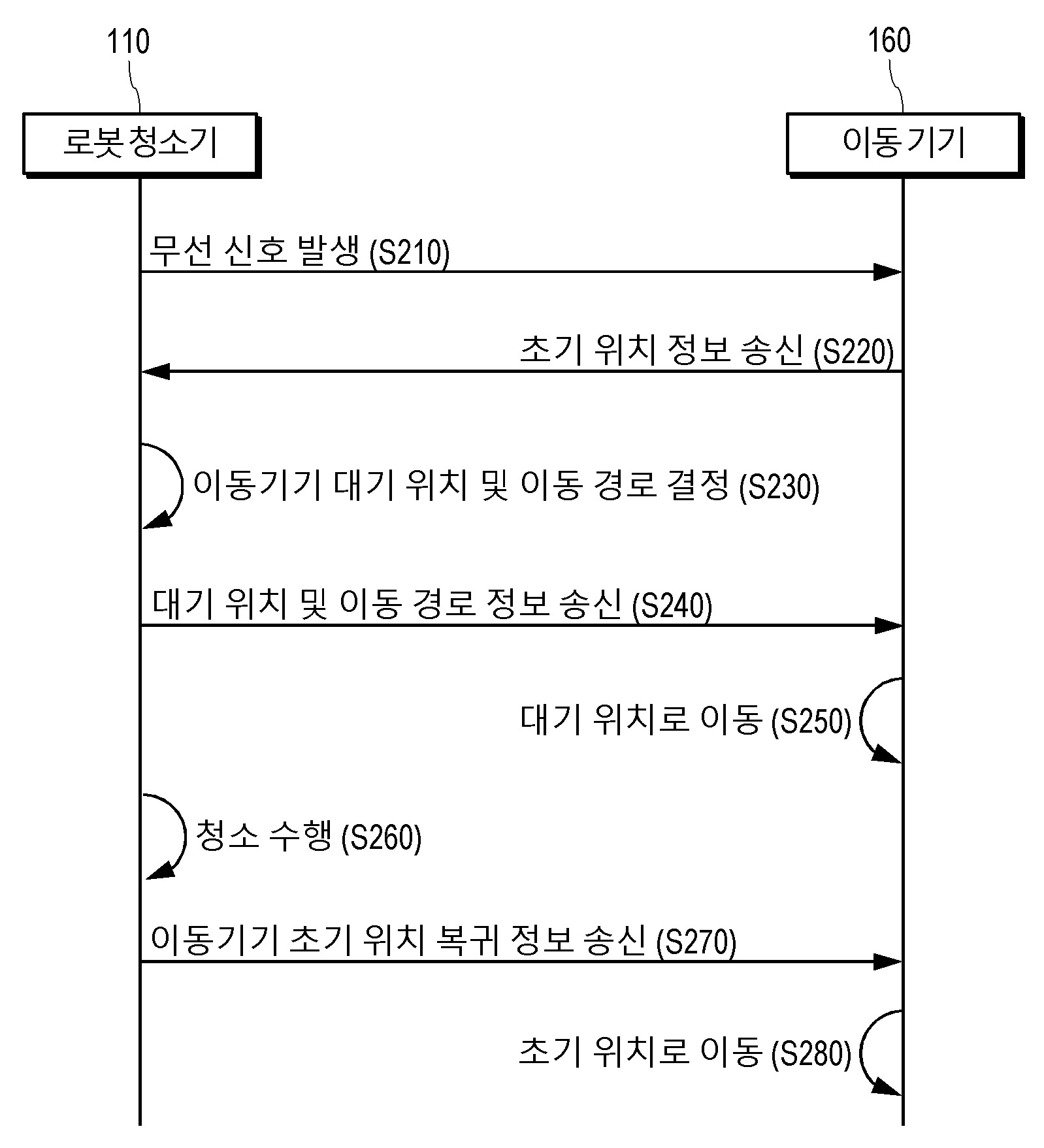
| 1 | 이동기기와 협력하여 효율적으로 청소를 수행하는 로봇 청소기에 있어서, 상기 로봇 청소기의 본체를 이동 또는 회전시키는 주행부; 무선통신을 이용하여 상기 이동기기로부터 상기 이동기기의 초기위치 정보를 획득하는 통신부; 및 상기 주행부 및 상기 통신부와 연결되어 상기 로봇 청소기를 제어하는 제어부;를 포함하고, 상기 제어부는, 상기 통신부를 통해 전달된 상기 이동기기의 초기위치 정보를 이용하여, 상기 이동기기가 위치하는 영역을 청소하는 동안 상기 이동기기가 대기할 대기위치를 결정하고, 상기 이동기기를 대기위치로 이동시키기 위한 정보를 상기 이동기기로 전송하고, 상기 제어부는, 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로에 수직한 방향에 청소가 완료된 영역이 있는 경우, 상기 대기위치를 상기 청소가 완료된 구역 내에 결정하고, 상기 이동기기가 대기위치로 이동하는 최단 경로를 이동 경로로 결정하고, 상기 이동 경로와 상기 청소 경로가 교차하는 시간 간격에 기초하여 상기 이동기기의 대기위치로의 출발 시각을 결정하고, 상기 제어부는, 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로에 수직한 방향에 청소가 완료된 영역이 없는 경우, 상기 대기위치를 상기 초기위치에서 상기 청소 경로에 수직한 방향으로 이격된 위치에 결정하고, 상기 이동기기가 대기위치로 이동하는 최단 경로를 이동 경로로 결정하고, 상기 이동 경로와 상기 청소 경로가 교차하는 시간 간격에 기초하여 상기 이동기기의 초기위치와 대기위치 사이의 이격 거리를 결정하고, 상기 제어부는, 상기 청소 경로와 상기 이동 경로가 복수의 위치에서 교차하는 경우, 상기 로봇 청소기가 교차되는 두 위치 사이를 이동하는 청소시간이 상기 이동기기가 교차되는 두 위치 사이를 이동하는 이동시간보다 크도록 상기 이동기기의 출발 시각을 결정하는, 로봇 청소기. |
| 2 | 제 1 항에 있어서, 상기 통신부는, 블루투스 통신을 사용하여 주기적으로 비콘신호를 외부로 전송하는 비콘; 및 상기 이동기기로부터 전송되는 초기위치 정보를 수신하는 수신모듈;을 포함하는, 로봇 청소기. |
| 3 | 제 1 항에 있어서, 상기 로봇 청소기의 주위에 존재하는 물체를 감지하는 센싱부;를 더 포함하는, 로봇 청소기. |
| 4 | 제 1 항에 있어서, 상기 제어부는, 상기 이동기기가 위치하는 영역의 청소가 완료되면, 상기 이동기기를 초기위치로 복귀시키기 위한 정보를 상기 이동기기로 전송하는, 로봇 청소기. |
| 5 | 제 1 항에 있어서, 상기 제어부는, 청소가 완료된 구역이 있는 경우, 상기 대기위치를 상기 청소가 완료된 구역 내에 결정하고, 청소가 완료된 구역이 없는 경우, 상기 대기위치를 가장 나중에 청소할 구역 내에 결정하는, 로봇 청소기. |
| 6 | 제 5 항에 있어서, 상기 제어부는, 상기 이동기기가 대기위치로 이동하는 최단 경로를 결정하고, 상기 최단 경로가 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로와 교차하지 않으면, 상기 최단 경로를 상기 이동기기가 대기위치로 이동하는 이동 경로로 결정하고, 상기 최단 경로가 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로와 교차하면, 상기 이동기기가 대기위치로 이동하는 경로 중 상기 청소 경로와 교차하지 않는 우회 경로 중 하나를 상기 이동기기가 대기위치로 이동하는 이동 경로로 결정하는, 로봇 청소기. |
| 7 | 제 5 항에 있어서, 상기 제어부는, 상기 이동기기가 대기위치로 이동하는 최단 경로를 결정하고, 상기 최단 경로가 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로와 교차하면, 상기 이동기기와 상기 로봇 청소기의 속도에 기초하여 상기 이동기기의 대기위치로의 출발시각을 결정하는, 로봇 청소기. |
| 8 | 제 1 항에 있어서, 상기 제어부는, 상기 이동기기가 위치하는 영역을 복수의 소구역으로 분할하고, 상기 이동기기가 위치하는 초기 소구역에 인접한 인접 소구역을 청소한 후에 상기 초기 소구역을 청소하도록 청소계획을 결정하고, 상기 인접 소구역의 청소가 완료되면, 상기 이동기기를 청소가 완료된 상기 인접 소구역으로 이동시키는 신호를 상기 이동기기로 전송하고, 상기 이동기기가 위치하는 초기 소구역에 대한 청소가 완료되면, 상기 인접 소구역에 대기중인 상기 이동기기를 상기 초기 소구역으로 복귀시키는 신호를 상기 이동기기로 전송하는, 로봇 청소기. |
| 9 | 삭제 |
| 10 | 삭제 |
| 11 | 이동기기와 협력하여 효율적으로 청소를 수행하는 로봇 청소기의 청소 방법에 있어서, 무선통신을 이용하여 상기 이동기기로부터 상기 이동기기의 초기위치 정보를 획득하는 단계; 상기 이동기기의 초기위치 정보를 이용하여, 상기 이동기기가 위치하는 영역을 청소하는 동안 상기 이동기기가 대기할 대기위치를 결정하는 단계; 상기 이동기기를 대기위치로 이동시키기 위한 정보를 상기 이동기기로 전송하는 단계; 및 상기 로봇 청소기의 본체를 이동 또는 회전시켜 청소를 수행하는 단계;를 포함하고, 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로에 수직한 방향에 청소가 완료된 영역이 있는 경우, 상기 대기위치를 상기 청소가 완료된 구역 내에 결정하는 단계; 상기 이동기기가 대기위치로 이동하는 최단 경로를 이동 경로로 결정하는 단계; 및 상기 이동 경로와 상기 청소 경로가 교차하는 시간 간격에 기초하여 상기 이동기기의 대기위치로의 출발 시각을 결정하는 단계;를 더 포함하고, 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로에 수직한 방향에 청소가 완료된 영역이 없는 경우, 상기 대기위치를 상기 초기위치에서 상기 청소 경로에 수직한 방향으로 이격된 위치에 결정하는 단계; 상기 이동기기가 대기위치로 이동하는 최단 경로를 이동 경로로 결정하는 단계; 및 상기 이동 경로와 상기 청소 경로가 교차하는 시간 간격에 기초하여 상기 이동기기의 초기위치와 대기위치 사이의 이격 거리를 결정하는 단계;를 더 포함하고, 상기 출발 시각을 결정하는 단계는, 상기 청소 경로와 상기 이동 경로가 복수의 위치에서 교차하는 경우, 상기 로봇 청소기가 교차되는 두 위치 사이를 이동하는 청소시간이 상기 이동기기가 교차되는 두 위치 사이를 이동하는 이동시간보다 크도록 상기 이동기기의 출발 시각을 결정하는 단계;를 포함하는, 로봇 청소기의 청소 방법. |
| 12 | 제 11 항에 있어서, 블루투스 통신을 사용하여 주기적으로 비콘신호를 외부로 전송하는 단계;를 더 포함하는, 로봇 청소기의 청소 방법. |
| 13 | 제 11 항에 있어서, 상기 로봇 청소기의 주위에 존재하는 물체를 감지하는 단계;를 더 포함하는, 로봇 청소기의 청소 방법. |
| 14 | 제 11 항에 있어서, 상기 이동기기가 위치하는 영역의 청소가 완료되면, 상기 이동기기를 초기위치로 복귀시키기 위한 정보를 상기 이동기기로 전송하는 단계;를 더 포함하는, 로봇 청소기의 청소 방법. |
| 15 | 제 11 항에 있어서, 청소가 완료된 구역이 있는 경우, 상기 대기위치를 상기 청소가 완료된 구역 내에 결정하는 단계; 및 청소가 완료된 구역이 없는 경우, 상기 대기위치를 가장 나중에 청소할 구역 내에 결정하는 단계;를 더 포함하는, 로봇 청소기의 청소 방법. |
| 16 | 제 15 항에 있어서, 상기 이동기기가 대기위치로 이동하는 최단 경로를 결정하는 단계; 상기 최단 경로가 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로와 교차하지 않으면, 상기 최단 경로를 상기 이동기기가 대기위치로 이동하는 이동 경로로 결정하는 단계; 및 상기 최단 경로가 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로와 교차하면, 상기 이동기기가 대기위치로 이동하는 경로 중 상기 청소 경로와 교차하지 않는 우회 경로 중 하나를 상기 이동기기가 대기위치로 이동하는 이동 경로로 결정하는 단계;를 더 포함하는, 로봇 청소기의 청소 방법. |
| 17 | 제 15 항에 있어서, 상기 이동기기가 대기위치로 이동하는 최단 경로를 결정하는 단계; 및 상기 최단 경로가 상기 로봇 청소기가 청소를 하기 위해 이동하는 청소 경로와 교차하면, 상기 이동기기와 상기 로봇 청소기의 속도에 기초하여 상기 이동기기의 대기위치로의 출발시각을 결정하는 단계;를 더 포함하는, 로봇 청소기의 청소 방법. |
| 18 | 제 11 항에 있어서, 상기 이동기기가 위치하는 영역을 복수의 소구역으로 분할하는 단계; 상기 이동기기가 위치하는 초기 소구역에 인접한 인접 소구역을 청소한 후에 상기 초기 소구역을 청소하도록 청소계획을 결정하는 단계; 상기 인접 소구역의 청소가 완료되면, 상기 이동기기를 청소가 완료된 상기 인접 소구역으로 이동시키는 신호를 상기 이동기기로 전송하는 단계; 및 상기 이동기기가 위치하는 초기 소구역에 대한 청소가 완료되면, 상기 인접 소구역에 대기중인 상기 이동기기를 상기 초기 소구역으로 복귀시키는 신호를 상기 이동기기로 전송하는 단계;를 더 포함하는, 로봇 청소기의 청소 방법. |
| 19 | 삭제 |
| 20 | 삭제 |