| 번호 | 청구항 |
|---|---|
| 6 | 제5항에 있어서,상기 UGV에 탑재된 제2 센서를 통해 노면 모니터링 대상인 크랙을 탐지하기 위해 칼라 정보를 획득하는 단계는, 상기 UGV가 등속도 운동을 하며 상기 제2 센서를 통해 이동 경로에서 노면의 크랙을 모니터링하고, 컴퓨터 비전 모델을 이용한 객체 탐지를 통해 칼라 형태 정보를 실시간으로 수집하여 컴퓨터 비전 모델을 이용한 객체 탐지를 통해 매 프레임에서 모니터링 대상인 크랙을 실시간으로 탐지하는 퓨전 센서 시스템의 동작 방법. |
| 7 | 제5항에 있어서,상기 UGV에 탑재된 제1 센서를 통해 상기 제2 센서를 통해 탐지된 크랙에 대한 깊이 정보를 획득하는 단계는, 상기 제1 센서를 통해 방출되는 스캔 라인은 상기 UGV에 대한 종방향에 수직하면서 중앙에 위치하고, 상기 제1 센서는 유휴 상태로 동작하다가 상기 제2 센서의 크랙 탐지 시 깊이 정보를 획득하기 상기 동적 샘플링 제어부의 제어에 따라 상기 제1 센서의 샘플링 주파수를 증가시키는 퓨전 센서 시스템의 동작 방법. |
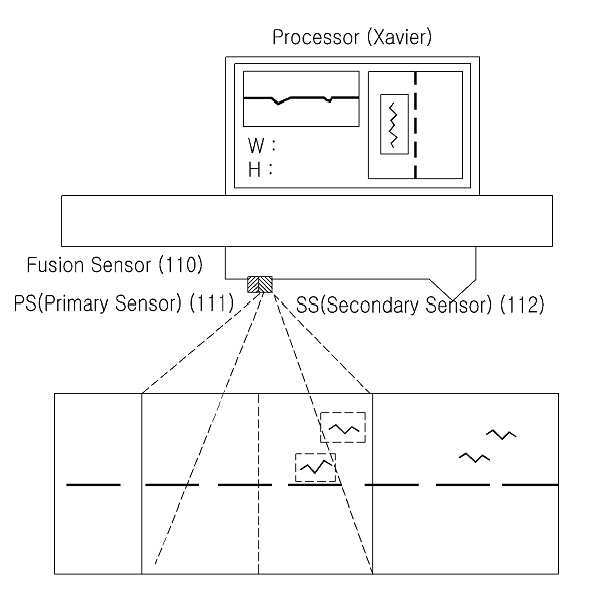
| 1 | 노면 모니터링 대상인 크랙을 탐지하기 위해 칼라 정보를 획득하는 UGV(Unmanned Ground Vehicle)에 탑재된 제2 센서; 상기 제2 센서를 통해 탐지된 크랙에 대한 깊이 정보를 획득하는 UGV에 탑재된 제1 센서; 및 크랙 탐지 시 상기 칼라 정보 및 상기 깊이 정보를 이용하여 동적으로 제1 센서의 샘플링 주파수를 조절하는 동적 샘플링 제어부 를 포함하는 퓨전 센서 시스템. |
| 2 | 제1항에 있어서, 상기 제2 센서는, 상기 UGV가 등속도 운동을 하며 상기 제2 센서를 통해 이동 경로에서 노면의 크랙을 모니터링하고, 컴퓨터 비전 모델을 이용한 객체 탐지를 통해 칼라 형태 정보를 실시간으로 수집하여 컴퓨터 비전 모델을 이용한 객체 탐지를 통해 매 프레임에서 모니터링 대상인 크랙을 실시간으로 탐지하는 퓨전 센서 시스템. |
| 3 | 제1항에 있어서, 상기 제1 센서는, 상기 제1 센서를 통해 방출되는 스캔 라인이 상기 UGV에 대한 종방향에 수직하면서 중앙에 위치하고, 상기 제1 센서는 유휴 상태로 동작하다가 상기 제2 센서의 크랙 탐지 시 깊이 정보를 획득하기 상기 동적 샘플링 제어부의 제어에 따라 상기 제1 센서의 샘플링 주파수를 증가시키는 퓨전 센서 시스템. |
| 4 | 제1항에 있어서,상기 동적 샘플링 제어부는, 상기 제2 센서의 이미지 프레임 상에서 탐지된 크랙과 상기 제1 센서를 통해 방출되는 스캔 라인의 거리, 상기 크랙의 바운드 박스의 좌표, 상기 스캔 라인이 크랙으로부터 떨어진 물리적 거리 및 상기 제1 센서의 샘플링 주파수 변경 지연시간을 이용하여 상기 제1 센서의 샘플링 주파수를 제어하는 퓨전 센서 시스템. |
| 5 | UGV(Unmanned Ground Vehicle)에 탑재된 제2 센서를 통해 노면 모니터링 대상인 크랙을 탐지하기 위해 칼라 정보를 획득하는 단계; UGV에 탑재된 제1 센서를 통해 상기 제2 센서를 통해 탐지된 크랙에 대한 깊이 정보를 획득하는 단계; 및 크랙 탐지 시 동적 샘플링 제어부를 통해 상기 칼라 정보 및 상기 깊이 정보를 이용하여 동적으로 제1 센서의 샘플링 주파수를 조절하는 단계 를 포함하는 퓨전 센서 시스템의 동작 방법. |
| 8 | 제5항에 있어서,상기 크랙 탐지 시 동적 샘플링 제어부를 통해 상기 칼라 정보 및 상기 깊이 정보를 이용하여 동적으로 제1 센서의 샘플링 주파수를 조절하는 단계는, 상기 제2 센서의 이미지 프레임 상에서 탐지된 크랙과 상기 제1 센서를 통해 방출되는 스캔 라인의 거리, 상기 크랙의 바운드 박스의 좌표, 상기 스캔 라인이 크랙으로부터 떨어진 물리적 거리 및 상기 제1 센서의 샘플링 주파수 변경 지연시간을 이용하여 상기 제1 센서의 샘플링 주파수를 제어하는 퓨전 센서 시스템의 동작 방법. |