| 번호 | 청구항 |
|---|---|
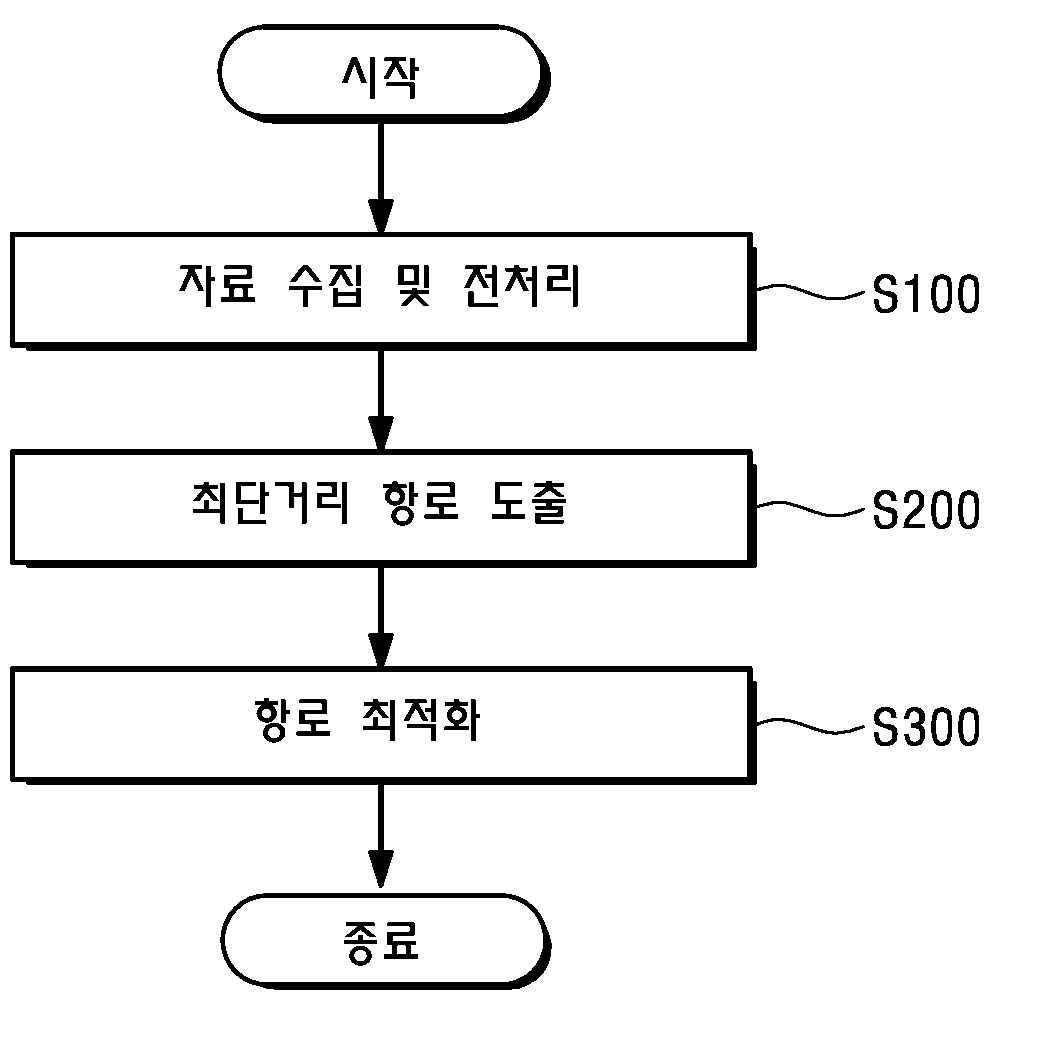
| 1 | 출발지와 도착지를 연결하는 최단거리 항로를 도출하는 단계; 및 3차원 동적 프로그래밍 방법을 사용하여 상기 최단거리 항로를 기준으로 도착 시간 조건 하에 바람, 파도, 해류를 포함하는 기상 예보 정보에 따라 연료 소모량을 최소화하도록 항로를 최적화하는 단계;를 포함하고,상기 최단거리 항로를 도출하는 단계는,균일 격자 구조의 수심 데이터를 쿼드트리 격자로 변환하는 단계;변환된 쿼드트리 격자의 바다 리프 노드를 연결하여 쿼드트리 그래프를 생성하는 단계;상기 쿼드트리 그래프 위에서 다익스트라 알고리즘을 활용하여 초기 항로를 도출하는 단계; 및상기 초기 항로를 기준으로 가시성 그래프를 활용한 항로 단순화 방법을 사용하여 불필요한 웨이포인트(waypoint)를 제거한 후 다익스트라 알고리즘을 활용하여 최단거리 항로를 도출하는 단계;를 포함하고,상기 항로를 최적화하는 단계는,상기 최단거리 항로를 따라가는 선박의 방위각을 기준으로 왼쪽과 오른쪽으로 90도의 각도로 경계선을 정의하고, 상기 최단거리 항로의 웨이포인트와 웨이포인트를 지나는 경계선 상의 좌우 두 경계가 만드는 선분을 항법 스테이지로 정의하는 단계;상기 항법 스테이지 상에 웨이포인트를 포함하는 노드들을 동일한 간격으로 설정하고, 인접한 항법 스테이지의 노드들을 연결하여 2D 항법 그래프를 구성하는 단계;상기 2D 항법 그래프에 이산화된 시간 차원을 추가하여 3D 그래프를 구성하는 단계; 및3D 동적 프로그래밍 방법을 적용하여 상기 3D 그래프 상에서 연료 소모량을 최소화하면서 도착시간 제한 조건을 만족하는 노드들을 연결하여 최적화된 항로를 도출하는 단계;를 포함하고,상기 2D 항법 그래프를 구성하는 단계에서, 인접한 항법 스테이지의 웨이포인트들을 연결할 때, 연결하고자 하는 노드들은 모두 통항 가능한 노드여야 하고, 항법 스테이지 Si 위에 있는 노드는 바로 다음 항법 스테이지 Si+1 위의 노드와 연결되어야 하고, 스테이지 Si의 노드에서 스테이지 Si+1의 노드로의 방향이 선박의 방위각을 기준으로 미리 설정된 각도 범위 내에 있어야 하고, 연결하고자 하는 노드들 사이에 장애물이 없어야 하는 것을 특징으로 하는 항로계획방법. |
| 2 | 제1항에 있어서,자료 수집 및 전처리 단계를 더 포함하고,상기 자료 수집 및 전처리 단계에서 상기 균일 격자 구조의 수심 데이터를 GEBCO(General Bathymetric Chart of the Oceans) 데이터로부터 획득하고,상기 쿼드트리 격자로 변환하는 단계에서 노드 내부가 하나의 속성값을 갖더라도 미리 설정된 최소 분할 깊이를 만족할 때까지 분할하고,상기 쿼드트리 그래프를 생성하는 단계에서 동경 180도에 인접한 GEBCO 균일 격자를 기준으로 해당 노드 위에 있는 쿼드트리 격자를 탐색하고, 탐색된 각 쿼드트리 격자 위에서 우측 방향(E)으로 리프 노드의 크기만큼 이동하여 서경 180도에 인접한 노드를 찾고, 두 노드 모두 바다 리프 노드라면 간선을 연결하여 그래프를 갱신하는 단계를 포함하는 것을 특징으로 하는 항로계획방법. |
| 3 | 제1항에 있어서,상기 2D 항법 그래프를 구성하는 단계에서, 서로 인접하는 웨이포인트 사이의 거리(di)가 미리 설정된 임계값(dmax)를 초과하는 경우 상기 서로 인접하는 웨이포인트 사이의 거리가 상기 임계값을 초과하지 않도록 상기 서로 인접하는 웨이포인트 사이에 웨이포인트를 추가하는 것을 특징으로 하는 항로계획방법. |
| 4 | 제1항에 있어서,자료 수집 및 전처리 단계를 더 포함하고,상기 자료 수집 및 전처리 단계에서 상기 바람, 파랑에 대한 정보는 GFS(Global Forecasting System)에서 획득하고, 상기 해류에 대한 정보는 RTOFS(Global Real-Time Ocean Forecast System)에서 데이터를 획득하고 하나의 GFS 격자 내에 복수 개의 RTOFS 격자가 존재하도록 획득된 데이터를 전처리하고,상기 항로를 최적화하는 단계에서, 하나의 노드에서 다음 노드로 이동하는 동안의 연료 소모량은 상기 하나의 노드와 다음 노드를 연결하는 선인 레그가 교차하는 복수 개의 GFS 격자 각각에서의 연료 소모량을 계산한 다음 합산하여 도출하고, 연료 소모량을 계산하기 위한 GFS 격자 각각에서의 이동 시간은 상기 레그가 교차하는 복수 개의 RTOFS 격자 각각에서의 이동시간을 합산하여 도출하는 것을 특징으로 하는 항로계획방법. |
| 5 | 제1항에 있어서,상기 3D 그래프를 구성하는 단계에서 상기 2D 항법 그래프의 노드에 시간축을 추가하고 상기 시간축 상에 상기 2D 항법 그래프의 노드로의 최소 도착 예정 시간(minETA), 최대 도착 예정 시간(maxETA), 및 minETA와 maxETA 사이를 균등하게 분할하는 위치에 노드들을 설정하여 상기 이산화된 시간 차원을 추가하는 것을 특징으로 하는 항로계획방법. |
| 6 | 제5항에 있어서,상기 최적화된 항로를 도출하는 단계에서 최적화된 항로는 각 스테이지에서의 최적해를 연결하여 도출하는 것을 특징으로 하는 항로계획방법. |
| 7 | 하드웨어와 결합되어 제1항 내지 제6항 중 어느 한 항에 따른 항로계획방법의 단계들을 실행시키기 위해 매체에 저장된 컴퓨터프로그램. |