| 번호 | 청구항 |
|---|---|
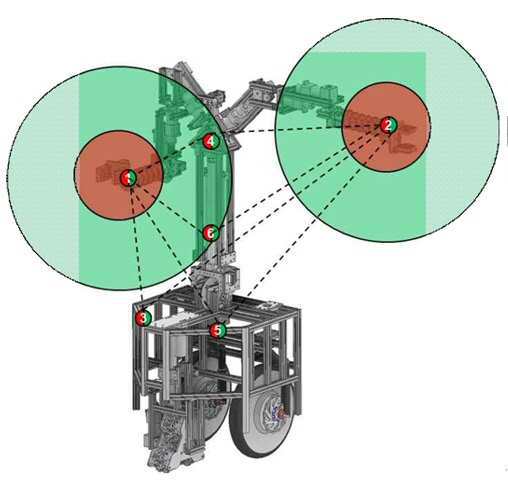
| 1 | 공간에서 이동 가능한 로봇에 있어서,이동의 제어가 가능한 모바일 유닛; 및 상기 모바일 유닛의 상부에 연결된 머니퓰레이터 유닛; 을 포함하고,상기 머니퓰레이터 유닛은 로봇 몸체와 그에 장착된 하나 이상의 로봇 팔로 구성되고,상기 머니퓰레이터 유닛의 로봇 팔 말단 및 로봇 몸체에 각각 하나 이상씩 위치하는 블루투스 모듈을 포함하고 상기 블루투스 모듈들은 서로의 위치를 송수신하며 로봇 팔과 로봇 몸체 간의 충돌을 방지하는,블루투스가 장착된 머니퓰레이터를 포함하는 로봇. |
| 2 | 실내 공간에서 로봇의 움직임을 제어하기 위한 시스템에 있어서,상기 로봇은 이동의 제어가 가능한 모바일 유닛; 및 상기 모바일 유닛의 상부에 연결된 머니퓰레이터 유닛; 을 포함하고,상기 실내 공간은 공간의 벽체 또는 상기 실내 공간에 존재하는 물체의 일 측에 부착된 제1 블루투스 모듈을 포함하고,상기 로봇은 제2 블루투스 모듈을 포함하는,블루투스를 이용한 실내 로봇 제어 시스템. |
| 3 | 제2항에 있어서,상기 제2 블루투스 모듈은,송신기, 수신기 및 안테나를 포함하고,상기 제1 블루투스 모듈과 연결되어 상기 로봇의 위치를 제어하는 신호를 수신하는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 4 | 제2항에 있어서,상기 제1 블루투스 모듈 및 상기 제2 블루투스 모듈은 서로 시간이 동기화된 것인,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 5 | 제2항에 있어서,상기 제1 블루투스 모듈 및 상기 제2 블루투스 모듈의 개수의 총합은 세 개 이상인 것인,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 6 | 제2항에 있어서,제1 블루투스 모듈과 제2 블루투스 모듈의 위치 정보를 수신하고, 상기 로봇의 움직임 제어 명령을 제2 블루투스 모듈로 송신하는 프로세서부; 를 더 포함하는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 7 | 제6항에 있어서,상기 머니퓰레이터 유닛은 로봇 몸체와 그에 장착된 하나 이상의 로봇 팔로 구성되고,상기 제2 블루투스 모듈은 상기 머니퓰레이터 유닛의 로봇 팔 말단 및 로봇 몸체에 각각 하나 이상씩 위치하는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 8 | 제7항에 있어서,상기 프로세서부는,상기 제2 블루투스 모듈들의 신호 강도로부터 서로의 위치 값을 도출하여, 로봇 팔과 로봇 몸체 간의 충돌을 방지하는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 9 | 제6항에 있어서,상기 프로세서부는,상기 제1 블루투스 모듈 및 제2 블루투스 모듈의 신호 강도에 기반하여,상기 로봇의 위치 값과 상기 공간의 벽체 또는 상기 실내 공간에 존재하는 물체의 위치 값을 각각 도출하고,상기 위치 값들의 변화를 실시간으로 파악하여 상기 실내 로봇의 회피 경로를 동적으로 계산하는, 블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 10 | 제9항에 있어서,상기 회피 경로는 계산 시 충돌 가능 거리를 변수로 사용하며,상기 충돌 가능 거리는 동적 블루투스 모듈이 정적 블루투스 모듈보다 더 크게 설정되는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 11 | 제6항에 있어서,상기 실내 공간은 3차원 공간이며,상기 프로세서부는 상기 제1 블루투스 모듈 및 제2 블루투스 모듈의 위치 값을 입력으로 하여, 멀티레터레이션 방식으로 상기 실내 공간 내에서 상기 실내 로봇의 위치를 추정하는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 12 | 제6항에 있어서,상기 프로세서부는,실내 공간에 배치된 제1 블루투스 모듈의 위치 값 및 신호 강도를 학습 데이터로 이용하여 인공지능 모델을 학습시키는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |
| 13 | 제6항에 있어서,상기 프로세서부는 기존의 제1 블루투스 모듈 및 제2 블루투스 모듈의 위치 정보에 기반하여 구축된 위치 데이터 베이스를 보유하고,상기 제어 시스템은,상기 공간에 새로이 추가된 제3 블루투스 모듈이 감지된 경우, 상기 블루투스 모듈의 식별 정보를 상기 위치 데이터 베이스에 등록하며, 상기 데이터 베이스의 정보를 기반으로 제3 블루투스 모듈과 신호를 송수신하며 실내 로봇의 충돌 방지를 수행하는,블루투스를 이용한 실내 로봇 위치 제어 시스템. |