| 번호 | 청구항 |
|---|---|
| 1 | 냉장고(200)에 있어서,냉매를 순환하기 위한 압축기(353);상기 압축기에 포함된 모터를 구동하기 위한 인버터 회로(351);인스트럭션들을 저장하는 하나 또는 다수의 저장 매체를 포함하는 메모리(212); 및처리 회로를 포함하고, 상기 인버터 회로(351)를 통하여 상기 압축기(251)의 구동을 제어하도록 구성된 적어도 하나의 프로세서(211)를 포함하며,상기 인스트럭션들이 적어도 하나의 프로세서(211)에 의해 개별적으로 또는 집합적으로 실행 시에, 상기 냉장고(200)로 하여금 적어도 하나의 동작을 수행하도록 야기하고,상기 적어도 하나의 동작은,상기 인버터 회로(351)에 의한 상기 압축기(251)의 구동과 관련된 속도, 토크 또는 자속에 관한 내재 데이터를 정규화 하여 고조파 정보를 포함하는 입력 데이터를 획득하는 동작;이상 검출 모델(340)을 기반으로 상기 입력 데이터에 포함된 상기 고조파 정보의 주요 특징(423)이 학습되지 않은 잠재 벡터에 해당하는 지를 판단하는 동작; 및상기 주요 특징(423)이 상기 학습되지 않은 잠재 벡터에 해당하는 것으로 판단하면, 상기 압축기(251)가 비정상적으로 구동하는 상태임을 예측하는 동작을 포함하며,여기서, 상기 이상 검출 모델(340)은 상기 압축기(251)가 정상적으로 구동하는 상태에서 획득될 수 있는 내재 데이터에 의해 임베디드 시스템으로 학습된 오토 인코더(auto encoder)인, 냉장고(200). |
| 2 | 제1항에 있어서,상기 인스트럭션들이 적어도 하나의 프로세서(211)에 의해 개별적으로 또는 집합적으로 실행 시에, 상기 냉장고(200)로 하여금,상기 이상 검출 모델(340)을 기반으로 상기 입력 데이터에 대한 인코딩 및 디코딩을 수행하여 상기 입력 데이터를 재구성하는 동작;상기 정규화된 입력 데이터와 상기 재구성된 입력 데이터를 비교하여 재구성 에러에 관한 정보를 획득하는 동작; 및상기 재구성 에러에 관한 정보에 기초하여 상기 압축기(251)가 정상적으로 구동하는 상태인지 또는 비정상적으로 구동하는 상태인지를 결정하는 동작을 수행하도록 야기하며,여기서, 상기 재구성 에러에 관한 정보는 상기 압축기(251)가 정상적으로 구동하는 상태인지를 지시하는 에러 지시자 또는 재구성 오류의 정도를 지시하는 에러 값을 포함하는, 냉장고(200). |
| 3 | 제1항 또는 제2항에 있어서,상기 내재 데이터는 상기 압축기(251)의 분당 회전 수 (revolutions per minute, RPM), 평균 토크, 자속 값, 제1토크 고조파, 또는 제2토크 고조파 중 적어도 하나를 포함하는, 냉장고(200). |
| 4 | 제1항 내지 제3항 중 어느 한 항에 있어서,상기 인스트럭션들이 적어도 하나의 프로세서(211)에 의해 개별적으로 또는 집합적으로 실행 시에, 상기 냉장고(200)로 하여금,헤테로다이닝 방법 또는 푸리에 연산에 의한 상기 내재 데이터에 대한 전처리를 수행하여 상기 내재 데이터를 정규화 한 상기 입력 데이터를 획득하는 동작을 수행하도록 야기하는, 냉장고(200). |
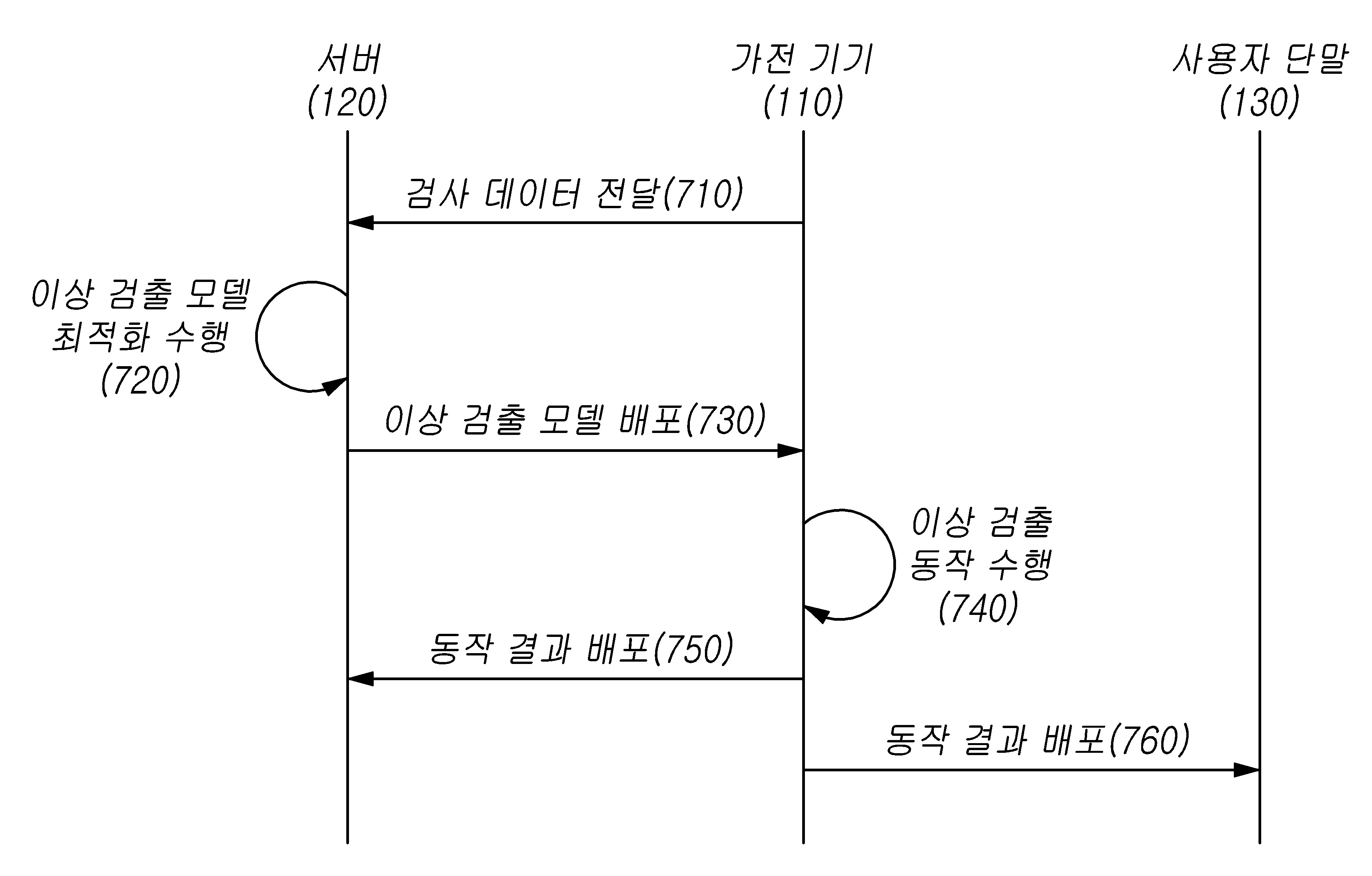
| 5 | 제1항에 있어서,통신 회로(230)를 포함하고,상기 인스트럭션들이 적어도 하나의 프로세서(211)에 의해 개별적으로 또는 집합적으로 실행 시에, 상기 냉장고(200)로 하여금,상기 통신 회로(230)을 통해 상기 임베디드 시스템으로 학습된 상기 이상 검출 모델(340)을 서버(120)로부터 수신하는 동작; 및상기 예측에 따른 상기 압축기(251)의 구동 상태에 관한 정보를 상기 통신 회로(230)를 통해 상기 서버(120) 또는 사용자 기기(130)으로 전송하는 동작을 수행하도록 야기하는, 냉장고(200). |
| 6 | 제1항 내지 제4항 중 어느 한 항에 있어서,상기 인스트럭션들이 적어도 하나의 프로세서(211)에 의해 개별적으로 또는 집합적으로 실행 시에, 상기 냉장고(200)로 하여금,상기 내재 데이터에 포함된 제어 변수 또는 상태 추정 값에 대한 주파수 특성 또는 위상 특성을 추출하기 위한 전처리 동작을 수행하도록 야기하는, 냉장고(200). |
| 7 | 제6항에 있어서,상기 제어 변수는 상기 인버터 회로(351)가 상기 압축기(353)의 구동 제어를 위해 활용한 전류 및 전압 정보에 관한 정보를 포함하며,상기 상태 추정 값은 상기 인버터 회로(351)가 상기 압축기(353)의 구동 제어를 위해 활용한 전류 및 전압을 기반으로 추정된 자속 세기 또는 모터 토크에 관한 상태 값을 포함하는, 냉장고(200). |
| 8 | 제5항에 있어서,상기 인스트럭션들이 적어도 하나의 프로세서(211)에 의해 개별적으로 또는 집합적으로 실행 시에, 상기 냉장고(200)로 하여금,상기 주요 특징(423)이 상기 압축기(251)가 정상적으로 구동하는 상태를 지시하는 지를 식별하기 위한 임계치를 상기 서버(120)로부터 전달받는 동작; 및상기 임계치를 외부 요청에 응답하여 조정하는 동작을 수행하도록 야기하는, 냉장고(200). |
| 9 | 제1항 내지 제8항 중 어느 한 항에 있어서,상기 고조파 정보는 고조파 크기 및/또는 고조파 위상에 관한 정보를 포함하는, 냉장고(200). |
| 10 | 가전기기(200)에 있어서,모터를 구동하기 위한 구동 장치(350);인스트럭션들을 저장하는 하나 또는 다수의 저장 매체를 포함하는 메모리(212); 및처리 회로를 포함하고, 상기 구동 장치(350)를 제어하도록 구성된 적어도 하나의 프로세서(211)를 포함하며,상기 인스트럭션들이 적어도 하나의 프로세서(211)에 의해 개별적으로 또는 집합적으로 실행 시에, 상기 가전기기(200)로 하여금 적어도 하나의 동작을 수행하도록 야기하고,상기 적어도 하나의 동작은,상기 구동 장치(350)에 의한 상기 모터의 구동과 관련된 속도, 토크 또는 자속에 관한 내재 데이터를 정규화 하여 고조파 정보를 포함하는 입력 데이터를 획득하는 동작;이상 검출 모델(340)을 기반으로 상기 입력 데이터에 포함된 상기 고조파 정보의 주요 특징(423)이 학습되지 않은 잠재 벡터에 해당하는 지를 판단하는 동작; 및상기 주요 특징(423)이 상기 학습되지 않은 잠재 벡터에 해당하는 것으로 판단하면, 상기 구동 장치(350)에 의해 구동되는 상기 모터가 정상 동작 상태임을 예측하는 동작을 포함하며,여기서, 상기 이상 검출 모델(340)은 상기 모터가 정상적으로 동작하는 상태에서 획득될 수 있는 내재 데이터에 의해 임베디드 시스템으로 학습된 오토 인코더(auto encoder)인, 가전기기(200). |