| 번호 | 청구항 |
|---|---|
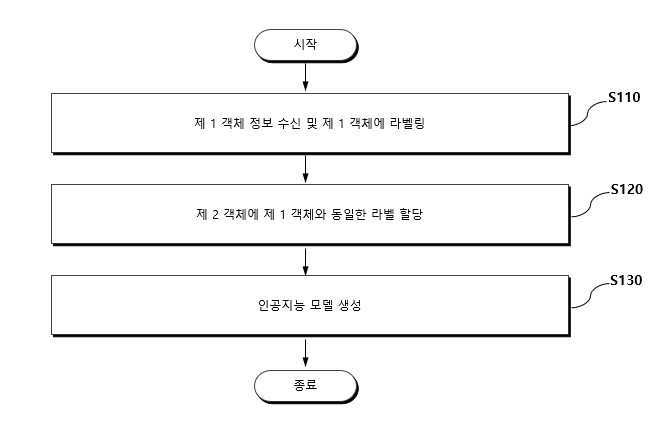
| 1 | 적어도 하나 이상의 프로세서에 의해 수행되는 인공지능 모델 생성 방법에 있어서, a) 기 설정된 사용자 환경에서 수집된 제1 이미지 내에 포함된 특정 사용자의 개인화된 객체에 대한 객체 정보를 수신하여, 상기 특정 사용자의 개인화된 제1 객체에 대한 라벨링을 수행하는 단계; b) 라벨링이 완료된 제1 객체의 임베딩 벡터와 기 설정된 사용자 환경에서 수집된 제2 이미지 내에 포함된 제2 객체의 임베딩 벡터 간의 유사도를 기초로, 상기 제1 객체와 기 설정된 유사도 이상인 제2 객체에 대해 상기 제1 객체의 라벨과 동일한 라벨을 할당하는 단계; 및c) 상기 제1 이미지 및 상기 제2 이미지를 학습데이터 세트로 하고, 상기 제1 객체 및 상기 제2 객체에 대한 라벨링 과정을 포함하며, 상기 특정 사용자의 개인화된 객체에 대한 명령을 수신하는 경우 상기 명령에 따른 제어 신호를 출력하도록 훈련된 인공지능 모델을 생성하는 단계를 포함하는, 개인화된 객체를 인식하는 인공지능 모델 생성 방법 |
| 2 | 제1항에 있어서,상기 객체 정보는, 상기 제1 객체에 대한 소유권 정보를 포함하는 자연어 인스트럭션; 및상기 제1 객체에 대한 다각도의 이미지를 포함하는 것인,개인화된 객체를 인식하는 인공지능 모델 생성 방법. |
| 3 | 제1항에 있어서,상기 b) 단계는,상기 라벨이 할당되지 않은 객체의 비율이 10% 미만이 될 때까지, 상기 제1 객체와 기 설정된 유사도 이상인 제2 객체에 대해 상기 제1 객체의 라벨과 동일한 라벨을 할당하는 단계를 반복하는 것인,개인화된 객체를 인식하는 인공지능 모델 생성 방법. |
| 4 | 제1항에 있어서,상기 유사도는,상기 라벨링이 완료된 제1 객체의 임베딩 벡터와 상기 제2 객체의 임베딩 벡터에 대한 코사인 유사도를 기초로 산출되는 것인,개인화된 객체를 인식하는 인공지능 모델 생성 방법. |
| 5 | 통신 모듈;적어도 하나 이상의 프로세서; 및상기 프로세서와 전기적으로 연결되고, 상기 프로세서에서 수행되는 적어도 하나의 코드(Code)가 저장된 메모리를 포함하고,상기 메모리는, 상기 프로세서를 통해 실행될 때,상기 프로세서가 기 설정된 사용자 환경에서 수집된 제1 이미지 내에 포함된 특정 사용자의 개인화된 객체에 대한 객체 정보를 수신하여, 상기 특정 사용자의 개인화된 제1 객체에 대한 라벨링을 수행하고, 라벨링이 완료된 제1 객체의 임베딩 벡터와 기 설정된 사용자 환경에서 수집된 제2 이미지 내에 포함된 제2 객체의 임베딩 벡터 간의 유사도를 기초로, 상기 제1 객체와 기 설정된 유사도 이상인 제2 객체에 대해 상기 제1 객체의 라벨과 동일한 라벨을 할당하고, 상기 제1 이미지 및 상기 제2 이미지를 학습데이터 세트로 하고, 상기 제1 객체 및 상기 제2 객체에 대한 라벨링 과정을 포함하며, 상기 특정 사용자의 개인화된 객체에 대한 명령을 수신하는 경우 상기 명령에 따른 제어 신호를 출력하도록 훈련된 인공지능 모델을 생성하도록 야기하는 코드를 저장하는 것인,개인화된 객체를 인식하는 인공지능 모델 생성 장치. |
| 6 | 제5항에 있어서,상기 객체 정보는, 상기 제1 객체에 대한 소유권 정보를 포함하는 자연어 인스트럭션; 및상기 제1 객체에 대한 다각도의 이미지를 포함하는 것인,개인화된 객체를 인식하는 인공지능 모델 생성 장치. |
| 7 | 제5항에 있어서,상기 메모리는,상기 프로세서가 상기 라벨이 할당되지 않은 객체의 비율이 10% 미만이 될 때까지 상기 제1 객체와 기 설정된 유사도 이상인 제2 객체에 대해 상기 제1 객체의 라벨과 동일한 라벨을 반복하여 할당하도록 야기하는 코드를 더 저장하는 것인,개인화된 객체를 인식하는 인공지능 모델 생성 장치. |
| 8 | 제5항에 있어서,상기 유사도는,상기 라벨링이 완료된 제1 객체의 임베딩 벡터와 상기 제2 객체의 임베딩 벡터에 대한 코사인 유사도를 기초로 산출되는 것인,개인화된 객체를 인식하는 인공지능 모델 생성 장치. |
| 9 | 적어도 하나 이상의 프로세서에 의해 수행되는 인공지능 모델을 이용한 로봇 제어 방법에 있어서,사용자로부터 상기 사용자의 객체에 대한 명령을 수신하는 단계;기 설정된 사용자 환경에서 수집된 이미지 내의 객체 중 상기 사용자의 객체와 동일한 객체를 탐색하는 단계; 및개인화된 객체를 인식하는 인공지능 모델을 통해 출력된 제어 신호를 기초로 상기 로봇을 제어하는 단계를 포함하고,상기 사용자로부터 상기 사용자의 객체에 대한 명령을 수신하는 단계 이전에, 개인화된 객체를 인식하는 인공지능 모델을 생성하는 단계를 더 포함하며,상기 개인화된 객체를 인식하는 인공지능 모델을 생성하는 단계는,기 설정된 사용자 환경에서 수집된 제1 이미지 내에 포함된 특정 사용자의 개인화된 객체에 대한 객체 정보를 수신하여, 상기 특정 사용자의 개인화된 제1 객체에 대한 라벨링을 수행하는 단계; 라벨링이 완료된 제1 객체의 임베딩 벡터와 기 설정된 사용자 환경에서 수집된 제2 이미지 내에 포함된 제2 객체의 임베딩 벡터 간의 유사도를 기초로, 상기 제1 객체와 기 설정된 유사도 이상인 제2 객체에 대해 상기 제1 객체의 라벨과 동일한 라벨을 할당하는 단계; 및상기 제1 이미지 및 상기 제2 이미지를 학습데이터 세트로 하고, 상기 제1 객체 및 상기 제2 객체에 대한 라벨링 과정을 포함하며, 상기 특정 사용자의 개인화된 객체에 대한 명령을 수신하는 경우 상기 명령에 따른 제어 신호를 출력하도록 훈련된 인공지능 모델을 생성하는 단계를 포함하는 것인,인공지능 모델을 이용한 로봇 제어 방법. |
| 10 | 삭제 |
| 11 | 제9항에 있어서,상기 사용자로부터 상기 사용자의 객체에 대한 명령을 수신하는 단계는,상기 명령을 기초로 상기 사용자의 객체에 대한 바운딩 박스(Bounding Box) 좌표를 추론하는 단계를 포함하며,상기 명령은,상기 사용자의 객체에 대한 소유권 정보를 포함하는 것인,인공지능 모델을 이용한 로봇 제어 방법. |
| 12 | 제9항에 있어서,상기 개인화된 객체를 인식하는 인공지능 모델을 통해 출력된 제어 신호를 기초로 상기 로봇을 제어하는 단계는,상기 로봇이 상기 사용자의 객체를 감지하고, 기 설정된 알고리즘을 통해 상기 사용자의 객체에 대한 3차원 좌표를 획득하여 상기 객체를 조작하는 것인,인공지능 모델을 이용한 로봇 제어 방법. |
| 13 | 인공지능 모델을 이용한 로봇 제어 시스템에 있어서,통신 모듈;적어도 하나 이상의 프로세서; 및상기 프로세서와 전기적으로 연결되고, 상기 프로세서에서 수행되는 적어도 하나의 코드(Code)가 저장된 메모리를 포함하고,상기 메모리는, 상기 프로세서를 통해 실행될 때,상기 프로세서가 사용자로부터 상기 사용자의 객체에 대한 명령을 수신하고, 기 설정된 사용자 환경에서 수집된 이미지 내의 객체 중 상기 사용자의 객체와 동일한 객체를 탐색하고, 개인화된 객체를 인식하는 인공지능 모델을 통해 출력된 제어 신호를 기초로 상기 로봇을 제어하도록 야기하는 코드를 저장하며,상기 메모리는,상기 프로세서가 사용자로부터 상기 사용자의 객체에 대한 명령을 수신하기 전에, 상기 프로세서가 기 설정된 사용자 환경에서 수집된 제1 이미지 내에 포함된 특정 사용자의 개인화된 객체에 대한 객체 정보를 수신하여, 상기 특정 사용자의 개인화된 제1 객체에 대한 라벨링을 수행하고, 라벨링이 완료된 제1 객체의 임베딩 벡터와 기 설정된 사용자 환경에서 수집된 제2 이미지 내에 포함된 제2 객체의 임베딩 벡터 간의 유사도를 기초로, 상기 제1 객체와 기 설정된 유사도 이상인 제2 객체에 대해 상기 제1 객체의 라벨과 동일한 라벨을 할당하고, 상기 제1 이미지 및 상기 제2 이미지를 학습데이터 세트로 하고, 상기 제1 객체 및 상기 제2 객체에 대한 라벨링 과정을 포함하며, 상기 특정 사용자의 개인화된 객체에 대한 명령을 수신하는 경우 상기 명령에 따른 제어 신호를 출력하도록 훈련된 인공지능 모델을 생성하도록 야기하는 코드를 더 저장하는 것인,인공지능 모델을 이용한 로봇 제어 시스템. |
| 14 | 삭제 |
| 15 | 제13항에 있어서,상기 메모리는,상기 프로세서가 상기 사용자의 객체에 대한 자연어 인스트럭션을 수신하고, 상기 자연어 인스트럭션을 기초로 상기 사용자의 객체에 대한 바운딩 박스 좌표를 추론하도록 야기하는 코드를 더 저장하며,상기 자연어 인스트럭션은,상기 사용자의 객체에 대한 소유권 정보를 포함하는 것인,인공지능 모델을 이용한 로봇 제어 시스템. |
| 16 | 제13항에 있어서,상기 메모리는,상기 프로세서가 상기 로봇이 상기 사용자의 객체를 감지하고, 기 설정된 알고리즘을 통해 상기 사용자의 객체에 대한 3차원 좌표를 획득하여 상기 객체를 조작하도록 야기하는 코드를 더 저장하는 것인,인공지능 모델을 이용한 로봇 제어 시스템. |