| 번호 | 청구항 |
|---|---|
| 8 | 제7항에 있어서, 상기 언레이블드 피처 데이터는 오토 인코더를 기반으로 인코딩되어 상기 서버로 전송되는 것을 특징으로 하는 서버. |
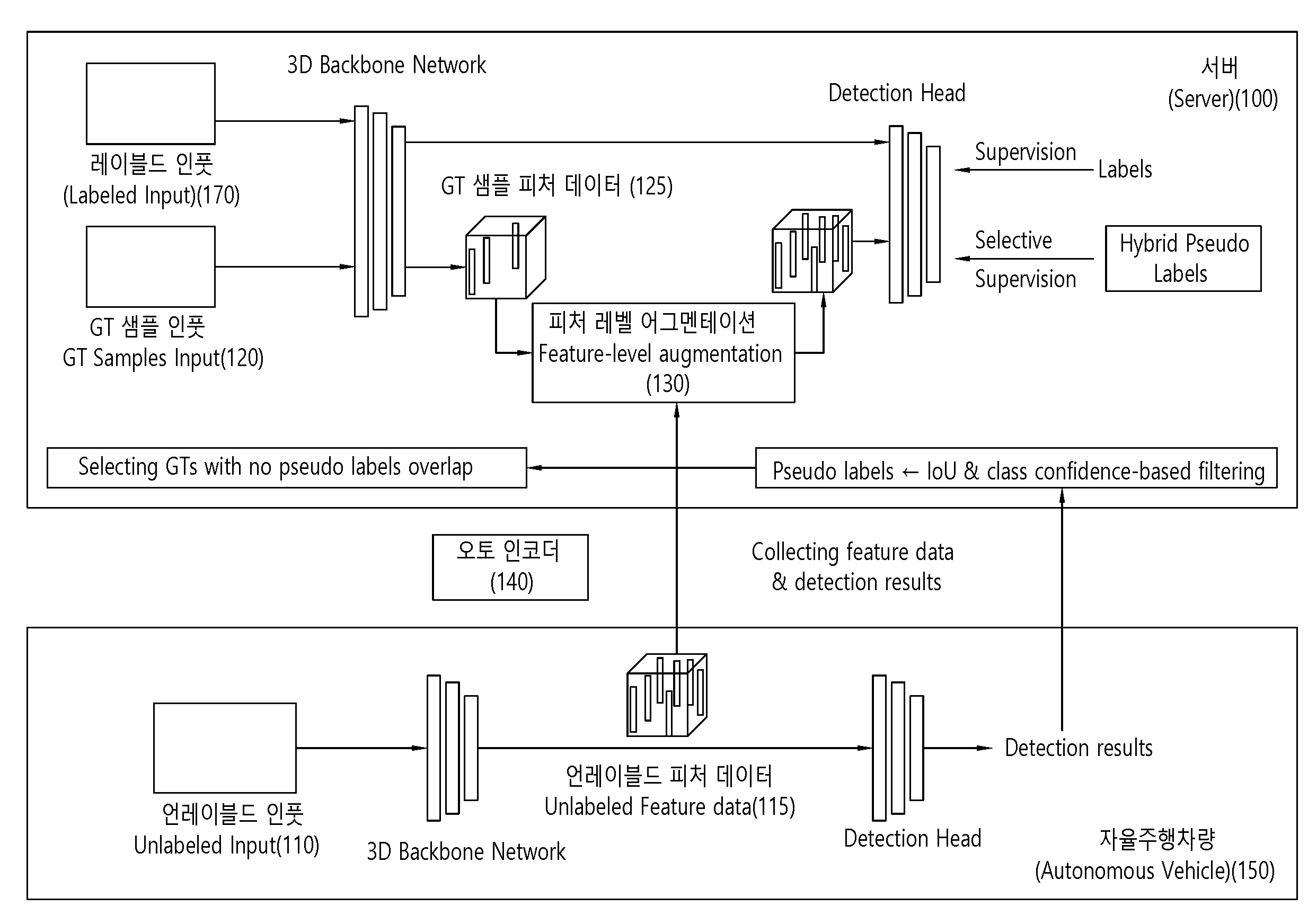
| 1 | 자율주행차량 내 물체 인식 모델 개선을 위한 피처 데이터 기반 준지도 방식 학습 방법은,서버가 상기 자율주행차량으로부터 언레이블드 피처 데이터를 수신하는 단계;상기 서버가 GT(ground truth) 샘플 피처 데이터와 상기 언레이블드 피처 데이터를 기반으로 한 피처-레벨 어그멘테이션을 수행하는 단계; 및상기 서버가 상기 피처-레벨 어그멘테이션을 기반으로 객체 인식 모델에 대한 준지도 학습을 수행하는 단계를 포함하는 것을 특징으로 하는 방법. |
| 2 | 제1항에 있어서,상기 언레이블드 피처 데이터는 객체 탐지 결과 임계 신뢰도 이상으로 탐지된 객체를 포함하는 데이터이고,상기 GT 샘플 피처 데이터는 미리 알고있는 객체만을 추출하여 생성된 데이터인 것을 특징으로 하는 방법. |
| 3 | 제2항에 있어서, 상기 피처-레벨 어그멘테이션은 그리드-타입 피처 어그멘테이션, 셋-타입 피처 어그멘테이션을 포함하는 것을 특징으로 하는 방법. |
| 4 | 제3항에 있어서, 상기 언레이블드 피처 데이터는 오토 인코더를 기반으로 인코딩되어 상기 서버로 전송되는 것을 특징으로 하는 방법. |
| 5 | 자율주행차량 내 물체 인식 모델 개선을 위한 피처 데이터 기반 준지도 방식 학습 방법을 수행하는 서버는,상기 자율주행차량으로부터 언레이블드 피처 데이터를 수신하고,GT(ground truth) 샘플 피처 데이터와 상기 언레이블드 피처 데이터를 기반으로 한 피처-레벨 어그멘테이션을 수행하고,상기 피처-레벨 어그멘테이션을 기반으로 객체 인식 모델에 대한 준지도 학습을 수행하도록 구현되는 것을 특징으로 하는 서버. |
| 6 | 제5항에 있어서,상기 언레이블드 피처 데이터는 객체 탐지 결과 임계 신뢰도 이상으로 탐지된 객체를 포함하는 데이터이고,상기 GT 샘플 피처 데이터는 미리 알고있는 객체만을 추출하여 생성된 데이터인 것을 특징으로 하는 서버. |
| 7 | 제6항에 있어서, 상기 피처-레벨 어그멘테이션은 그리드-타입 피처 어그멘테이션, 셋-타입 피처 어그멘테이션을 포함하는 것을 특징으로 하는 서버. |