| 번호 | 청구항 |
|---|---|
| 1 | 컴퓨팅 장치에 의해 수행되는 미사일 유도 방법에 있어서,유도탄 및 탄도탄의 교전 기구학 환경을 마르코프 결정 과정(MDP)으로 모델링하는 단계;학습된 인공 신경망을 이용하여 상기 마르코프 결정 과정의 복수의 파라미터에 대한 상기 유도탄 및 탄도탄의 관측값을 기초로 상기 유도탄에 대한 제어 명령을 생성하는 단계; 및상기 제어 명령을 기초로 상기 유도탄을 유도하는 단계;를 포함하는, 미사일 유도 방법. |
| 2 | 제1 항에 있어서,강화학습 알고리즘을 이용하여 상기 인공 신경망을 학습시키는 단계를 더 포함하고,상기 인공 신경망을 학습시키는 단계는, 상기 유도탄 및 탄도탄의 관측값을 획득하는 단계; 상기 인공 신경망이 생성한 상기 제어 명령을 획득하는 단계; 및 강화학습 알고리즘을 이용하여 상기 유도탄 및 탄도탄의 관측값, 및 상기 제어 명령을 기초로 상기 인공 신경망을 강화학습시키는 단계를 포함하는, 미사일 유도 방법. |
| 3 | 제1 항에 있어서,상기 모델링하는 단계는, 상기 유도탄 및 상기 탄도탄의 2차원 또는 3차원 교전 기구학 환경을 마르코프 결정 과정(MDP)으로 모델링하는 단계를 포함하는, 미사일 유도 방법. |
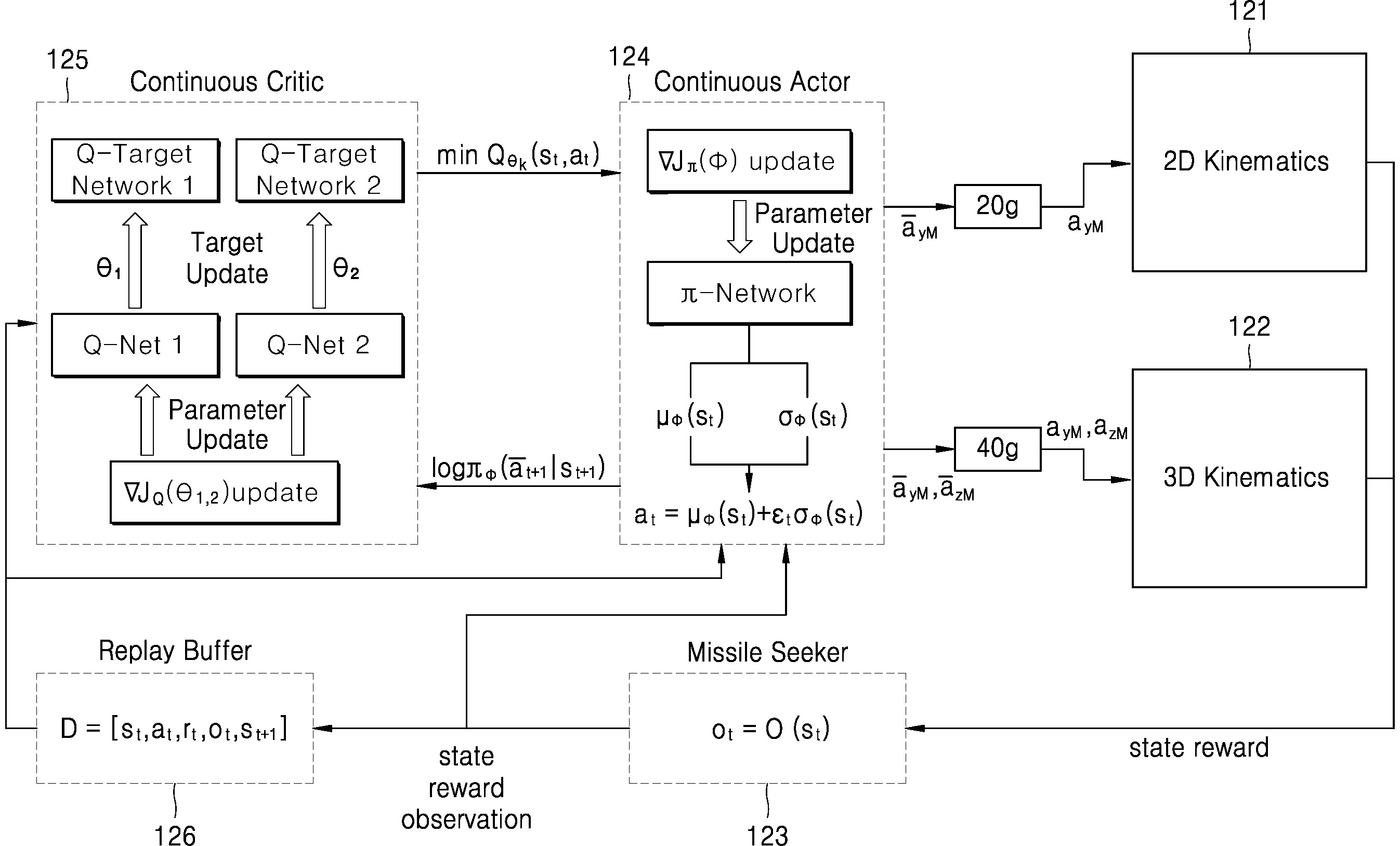
| 4 | 제1 항에 있어서,상기 제어 명령을 생성하는 단계는, 상기 유도탄 및 탄도탄의 관측값을 기초로 상기 유도탄에 대한 액션값을 생성하는 단계; 및상기 액션값에 2차원 환산계수 또는 3차원 환산계수를 곱하여 최종 가속도 명령을 생성하는 단계를 포함하는, 미사일 유도 방법. |
| 5 | 제4 항에 있어서,상기 2차원 환산계수는 20g의 값을 갖고, 상기 3차원 환산계수는 40g의 값을 갖는, 미사일 유도 방법. |
| 6 | 제4 항에 있어서,상기 관측값 및 상기 액션값은 각각 미리 정해진 범위의 값으로 정규화된 값을 갖는, 미사일 유도 방법. |
| 7 | 제6 항에 있어서,상기 관측값은 - 내지 +의 범위를 갖고, 상기 액션값은 -1 내지 +1의 범위를 갖는, 미사일 유도 방법. |
| 8 | 컴퓨팅 장치를 이용하여 제1 항 내지 제7 항 중 어느 한 항의 방법을 실행시키기 위하여 기록매체에 저장된 컴퓨터 프로그램. |
| 9 | 프로세서;를 포함하고,상기 프로세서는, 유도탄 및 탄도탄의 교전 기구학 환경을 마르코프 결정 과정(MDP)으로 모델링하고, 학습된 인공 신경망을 이용하여 상기 마르코프 결정 과정의 복수의 파라미터에 대한 상기 유도탄 및 탄도탄의 관측값을 기초로 상기 유도탄에 대한 제어 명령을 생성하고, 상기 제어 명령을 기초로 상기 유도탄을 유도하는, 미사일 유도 장치. |
| 10 | 제9 항에 있어서,상기 프로세서는, 상기 유도탄 및 탄도탄의 관측값을 획득하고, 상기 인공 신경망이 생성한 상기 제어 명령을 획득하고, 강화학습 알고리즘을 이용하여 상기 유도탄 및 탄도탄의 관측값, 및 상기 제어 명령을 기초로 상기 인공 신경망을 강화학습시키는, 미사일 유도 장치. |
| 11 | 제9 항에 있어서,상기 프로세서는, 상기 유도탄 및 상기 탄도탄의 2차원 또는 3차원 교전 기구학 환경을 마르코프 결정 과정(MDP)으로 모델링하는, 미사일 유도 장치. |
| 12 | 제9 항에 있어서,상기 프로세서는, 상기 유도탄 및 탄도탄의 관측값을 기초로 상기 유도탄에 대한 액션값을 생성하고, 상기 액션값에 2차원 환산계수 또는 3차원 환산계수를 곱하여 최종 가속도 명령을 생성하는, 미사일 유도 장치. |
| 13 | 제12 항에 있어서,상기 2차원 환산계수는 20g의 값을 갖고, 상기 3차원 환산계수는 40g의 값을 갖는, 미사일 유도 장치. |
| 14 | 제12 항에 있어서,상기 관측값 및 상기 액션값은 각각 미리 정해진 범위의 값으로 정규화된 값을 갖는, 미사일 유도 장치. |
| 15 | 제14 항에 있어서,상기 관측값은 -내지 +의 범위를 갖고, 상기 액션값은 -1 내지 +1의 범위를 갖는, 미사일 유도 장치. |