| 번호 | 청구항 |
|---|---|
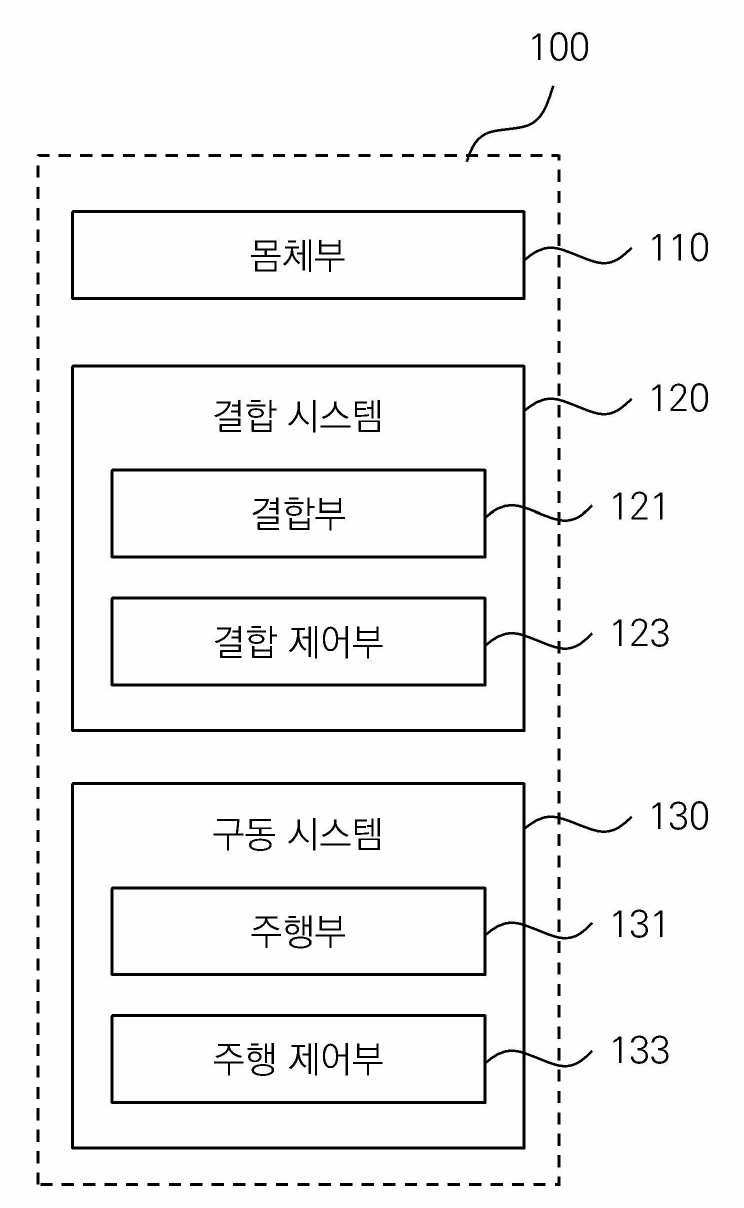
| 1 | 휠 플랫폼에 탈부착되는 견인 로봇에 있어서,상기 휠 플랫폼의 보조륜이 거치되는 거치부를 포함하는 몸체부;상기 몸체부가 상기 보조륜에 고정 결합되게 하는 결합 시스템; 및메카놈휠을 주행부로 포함하고, 단독 상태에서는 독립 주행을 수행하고, 결합 상태에서는 상기 휠 플랫폼의 주륜에 의한 구속조건이 반영된 결합 주행을 수행하는 구동 시스템을 포함하되,상기 결합 시스템은, 상기 거치부에 설치되고, 상기 보조륜의 내측면에 대해 외측 방향으로 밀어내어 고정 결합되게 하는 결합부와;상기 결합부의 동작을 제어하는 결합 제어부를 포함하는 것을 특징으로 하는 메카놈휠 기반 견인 로봇. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 결합부는, 상기 거치부의 가운데에 설치되는 고정몸체와;상기 고정몸체의 양측으로 확장되는 암과, 상기 암의 끝단에 신축성 재질로 이루어진 고정단이 설치된 확장형 고정암을 포함하고, 상기 고정단이 상기 보조륜의 내측면에 맞닿게 하는 것을 특징으로 하는 메카놈휠 기반 견인 로봇. |
| 4 | 제3항에 있어서,상기 결합부는 상기 거치부에 설치되고, 상기 거치부로의 상기 보조륜의 진입 여부를 감지하는 감지 센서를 더 포함하고, 상기 결합 제어부는 상기 감지 센서의 센싱 데이터에 상응하여 상기 확장형 고정암을 확장시키는 제어 신호를 생성하여 출력하는 것을 특징으로 하는 메카놈휠 기반 견인 로봇. |
| 5 | 제3항에 있어서,상기 고정단에는 압력 센서가 마련되고, 상기 압력 센서의 센싱 데이터에 기초하여 상기 결합 제어부는 상기 고정단이 상기 보조륜의 내측면과 최초 접촉한 이후 일정 시간 동안 지속적으로 상기 암을 확장시키는 것을 특징으로 하는 메카놈휠 기반 견인 로봇. |
| 6 | 제1항에 있어서,상기 거치부는 좌측과 우측의 2개 거치공간으로 구분되고,상기 결합부는, 상기 거치공간 사이에 설치되고, 좌우로 이동되는 한 쌍의 고정암과;상기 몸체부의 좌우 방향으로 길게 연장되고, 상기 고정암의 일단에 이동 가능하게 설치된 리니어 가이드 레일을 포함하며, 상기 고정암의 타단에는 외측을 향해 소정 폭만큼 돌출된 걸이부가 마련된 것을 특징으로 하는 메카놈휠 기반 견인 로봇. |
| 7 | 휠 플랫폼에 탈부착되는 견인 로봇에 있어서,상기 휠 플랫폼의 보조륜이 거치되는 거치부를 포함하는 몸체부;상기 몸체부가 상기 보조륜에 고정 결합되게 하는 결합 시스템; 및메카놈휠을 주행부로 포함하고, 단독 상태에서는 독립 주행을 수행하고, 결합 상태에서는 상기 휠 플랫폼의 주륜에 의한 구속조건이 반영된 결합 주행을 수행하는 구동 시스템을 포함하되, 상기 구동 시스템은, 상기 몸체부에 설치되어 4륜 구동되는 4개의 메카놈휠을 포함하는 주행부와;상기 4개의 메카놈휠 각각의 회전수를 제어하여 목표 절대속도와 회전반경이 달성되게 하는 주행 제어부를 포함하며,홀로노믹(holonomic) 구동 특성을 가지고, 상기 구속조건은 상기 주륜으로 인한 애커만 제약조건인 것을 특징으로 하는 메카놈휠 기반 견인 로봇. |
| 8 | 삭제 |
| 9 | 휠 플랫폼에 탈부착되는 4개의 메카놈휠을 구비한 메카놈휠 기반 견인 로봇의 주행 제어 방법에 있어서,(a) 주행 제어부는 상기 견인 로봇을 독립 주행시켜 상기 휠 플랫폼에 접근시키는 단계;(b) 상기 휠 플랫폼의 보조륜이 상기 견인 로봇의 몸체부 상에 진입하면, 결합 제어부가 상기 몸체부의 결합부를 동작시켜 상기 보조륜에 고정 결합시키는 단계; 및(c) 결합 상태에서 상기 주행 제어부는 사용자 입력에 따라 혹은 목표 경로에 따라 상기 견인 로봇이 상기 휠 플랫폼에 견인력을 제공하도록 결합 주행 제어하는 단계를 포함하되,상기 단계 (a)에서 상기 주행 제어부는 하기 수학식의 관계에 따라 상기 4개의 메카놈휠의 회전수를 결정하는 것을 특징으로 하는 메카놈휠 기반 견인 로봇 주행 제어 방법,여기서, 과 는 도 12에 도시된 것과 같은 로봇 부착 좌표계 기준의 2차원 병진운동 속도 및 각속도를 의미하며, Rmec은 메카놈휠의 반지름을, a와 b는 각각 질량중심(center of mass)에서부터 각 메카놈휠까지의 x와 y방향 거리를 의미하며, ω{1,2,3,4}는 각 메카놈휠의 회전속도를 의미함. |
| 10 | 삭제 |
| 11 | 휠 플랫폼에 탈부착되는 4개의 메카놈휠을 구비한 메카놈휠 기반 견인 로봇의 주행 제어 방법에 있어서,(a) 주행 제어부는 상기 견인 로봇을 독립 주행시켜 상기 휠 플랫폼에 접근시키는 단계;(b) 상기 휠 플랫폼의 보조륜이 상기 견인 로봇의 몸체부 상에 진입하면, 결합 제어부가 상기 몸체부의 결합부를 동작시켜 상기 보조륜에 고정 결합시키는 단계; 및(c) 결합 상태에서 상기 주행 제어부는 사용자 입력에 따라 혹은 목표 경로에 따라 상기 견인 로봇이 상기 휠 플랫폼에 견인력을 제공하도록 결합 주행 제어하는 단계를 포함하되,상기 단계 (c)에서 상기 주행 제어부는 목표 절대속도(Vr), 회전반경(R), 상기 견인 로봇의 질량중심과 상기 휠 플랫폼의 주륜 축 사이의 거리(l)을 입력 파라미터로 하고 하기 수학식을 이용하여 상기 4개의 메카놈휠의 회전수를 결정하는 것을 특징으로 하는 메카놈휠 기반 견인 로봇 주행 제어 방법, |