| 번호 | 청구항 |
|---|---|
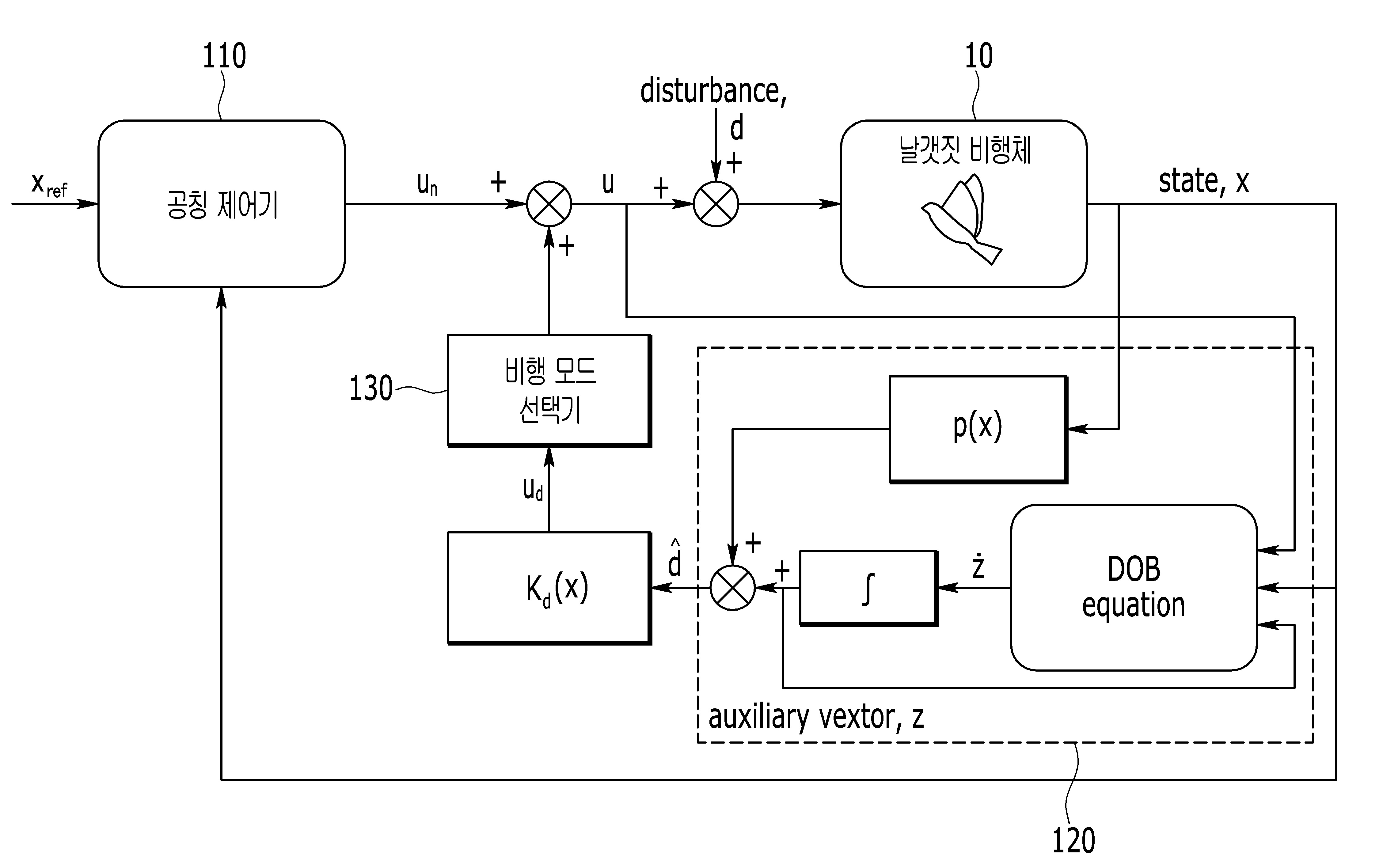
| 1 | 생체 모방 비행체가 정해진 피치 각도를 유지하고 주어진 궤적 명령을 따라가도록 제1 제어 입력을 생성하는 공칭 제어기;외란 추정치를 산출하는 외란 관측기; 및상기 공칭 제어기가 작동하는 공칭 모드 및 상기 외란 관측기가 작동하는 강건 제어 모드 중 하나를 비행 모드로 선택하는 비행 모드 선택기를 포함하고,상기 비행 모드 선택기는 희박 가우시안 회귀 분석 기법을 사용하여 외란의 존재 유무를 실시간으로 파악하는 생체 모방 비행체의 외부 환경 운용을 위한 제어 장치. |
| 2 | 제1 항에 있어서,상기 비행 모드 선택기는 외란이 존재하는 경우에 상기 외란 관측기를 활성화시켜 상기 강건 제어 모드를 수행하는 생체 모방 비행체의 외부 환경 운용을 위한 제어 장치. |
| 3 | 삭제 |
| 4 | 제1 항에 있어서,상기 비행 모드 선택기는 상기 생체 모방 비행체의 오일러 각도, 동체 속도 및 동체 각속도로 구성되는 상태 벡터, 상기 상태 벡터의 평균 값 및 상기 상태 벡터의 분산을 포함하는 Z-점수가 일정 문턱값보다 크면 상기 외란이 존재하는 것으로 판단하는 생체 모방 비행체의 외부 환경 운용을 위한 제어 장치. |
| 5 | 제1 항에 있어서,상기 강건 제어 모드에서 상기 외란 관측기에서 산출된 상기 외란 추정치에 보상 게인을 곱한 제2 제어 입력과 상기 공칭 제어기에서 생성된 상기 제1 제어 입력의 합인 전체 제어 입력에 의해 상기 생체 모방 비행체가 제어되는 생체 모방 비행체의 외부 환경 운용을 위한 제어 장치. |
| 6 | 정해진 피치 각도를 유지하고 주어진 궤적 명령을 따라가도록 제1 제어 입력을 생성하는 공칭 제어기;외란 추정치를 산출하는 외란 관측기; 및외란이 감지되면 상기 외란 관측기에서 산출된 상기 외란 추정치에 보상 게인을 곱한 제2 제어 입력을 활성화하는 비행 모드 선택기를 포함하고,상기 비행 모드 선택기는 희박 가우시안 회귀 분석 기법을 사용하여 상기 외란의 존재 유무를 실시간으로 파악하는 생체 모방 비행체. |
| 7 | 삭제 |
| 8 | 제6 항에 있어서,상기 비행 모드 선택기는 생체 모방 비행체의 오일러 각도, 동체 속도 및 동체 각속도로 구성되는 상태 벡터, 상기 상태 벡터의 평균 값 및 상기 상태 벡터의 분산을 포함하는 Z-점수가 일정 문턱값보다 크면 상기 외란이 존재하는 것으로 판단하는 생체 모방 비행체. |
| 9 | 제6 항에 있어서,상기 외란 관측기에서 산출된 상기 외란 추정치에 보상 게인을 곱한 제2 제어 입력과 상기 공칭 제어기에서 생성된 상기 제1 제어 입력의 합인 전체 제어 입력에 의해 제어되는 생체 모방 비행체. |
| 10 | 생체 모방 비행체가 정해진 피치 각도를 유지하고 주어진 궤적 명령을 따라가도록 제1 제어 입력을 생성하는 단계; 및상기 제1 제어 입력으로 상기 생체 모방 비행체를 제어하는 공칭 모드 및 외란 추정치를 산출하여 제2 제어 입력을 생성하는 강건 제어 모드 중 하나를 비행 모드로 선택하는 단계를 포함하고,희박 가우시안 회귀 분석 기법을 사용하여 외란의 존재 유무를 실시간으로 파악하는 생체 모방 비행체의 외부 환경 운용을 위한 제어 방법. |
| 11 | 제10 항에 있어서,외란이 존재하지 않는 경우에 상기 공칭 모드를 수행하고, 외란이 존재하는 경우에 상기 강건 제어 모드를 수행하는 생체 모방 비행체의 외부 환경 운용을 위한 제어 방법. |
| 12 | 삭제 |
| 13 | 제10 항에 있어서,상기 생체 모방 비행체의 오일러 각도, 동체 속도 및 동체 각속도로 구성되는 상태 벡터, 상기 상태 벡터의 평균 값 및 상기 상태 벡터의 분산을 포함하는 Z-점수가 일정 문턱값보다 크면 상기 외란이 존재하는 것으로 판단하는 생체 모방 비행체의 외부 환경 운용을 위한 제어 방법. |
| 14 | 제10 항에 있어서,상기 강건 제어 모드에서 상기 외란 추정치에 보상 게인을 곱한 제2 제어 입력과 상기 제1 제어 입력의 합인 전체 제어 입력으로 상기 생체 모방 비행체를 제어하는 생체 모방 비행체의 외부 환경 운용을 위한 제어 방법. |