| 번호 | 청구항 |
|---|---|
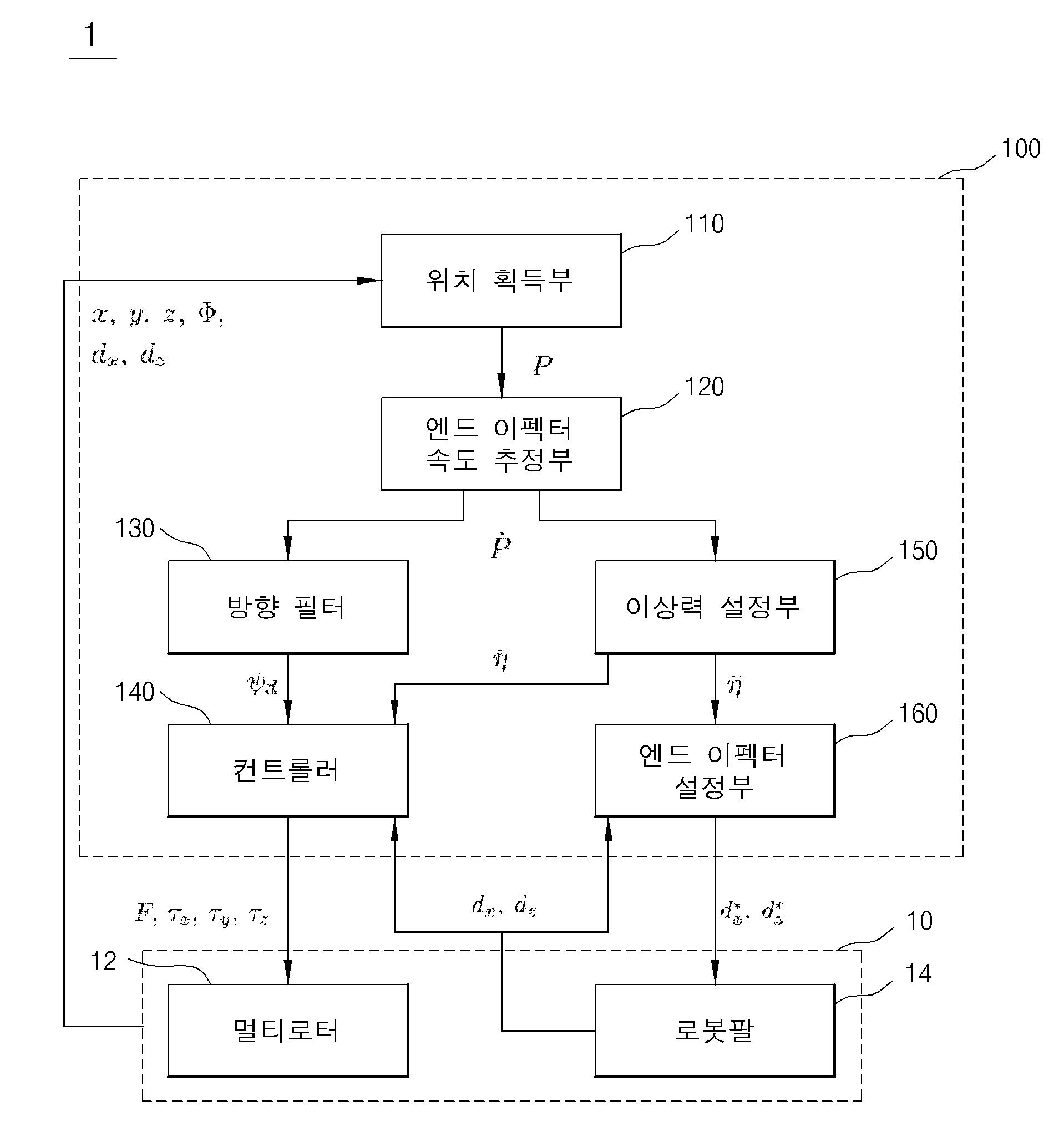
| 1 | 멀티로터에 로봇팔이 부착된 비행 매니퓰레이터를 이용하여 기구적 구조물을 오퍼레이팅하는 장치로서, 상기 비행 매니퓰레이터에 관한 위치정보를 획득하는 위치 획득부;상기 위치정보로부터 상기 로봇팔의 끝단에 설치된 엔드 이펙터의 속도를 추정하는 엔드 이펙터 속도 추정부;상기 엔드 이펙터의 속도를 이용하여 상기 기구적 구조물의 이동 방향을 추정하는 방향 필터; 추정된 상기 이동 방향에 상응하여 상기 멀티로터의 추력 및 모멘트를 산출하여 상기 멀티로터를 제어하는 컨트롤러를 포함하되,상기 엔드 이펙터의 속도를 이용하여 상기 기구적 구조물을 미리 지정된 이상적인 속도로 이동시키는 이상력(desired force)을 설정하는 이상력 설정부를 더 포함하고, 상기 컨트롤러는 상기 이상력을 이용하여 상기 멀티로터의 위치 및 자세를 조작하는 것을 특징으로 하는 오퍼레이팅 장치. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 기구적 구조물은 이동 방향이 제한적으로 허용되는 기구적 제한을 가지는 것을 특징으로 하는 오퍼레이팅 장치. |
| 4 | 제3항에 있어서,상기 기구적 구조물은 상기 이동 방향과 상기 기구적 구조물의 기구적 특성이 사전에 제공되지 않는 미지의 구조물인 것을 특징으로 하는 오퍼레이팅 장치. |
| 5 | 제1항에 있어서,상기 이상력과 상기 엔드 이펙터의 위치를 이용하여 상기 엔드 이펙터의 궤도를 설정하는 엔드 이펙터 설정부를 더 포함하는 오퍼레이팅 장치. |
| 6 | 제1항에 있어서,상기 비행 매니퓰레이터는 연결 부위(joint)가 축에 대해 회전하는 로봇팔을 가지고 있으며, 상기 엔드 이펙터는 상기 멀티로터의 질량 중심에 위치하는 프레임 의 평면()에서 움직이도록 허용되는 것을 특징으로 하는 오퍼레이팅 장치. |
| 7 | 제1항에 있어서,상기 방향 필터는 다음 수학식에 따라 상기 기구적 구조물의 이동 방향을 추정하는 것을 특징으로 하는 오퍼레이팅 장치,여기서, 는 상기 기구적 구조물의 이동 방향이고, 는 상기 방향 필터의 대역폭을 결정하는 파라미터이고, 는 상기 엔드 이펙터의 속도임. |
| 8 | 제7항에 있어서,상기 방향 필터는 다음 수학식에 따라 상기 이동 방향을 변환하여 상기 컨트롤러에서 이용되도록 하는 것을 특징으로 하는 오퍼레이팅 장치,여기서, 는 상기 기구적 구조물의 이상적인 요(yaw) 각도임. |
| 9 | 제5항에 있어서,상기 엔드 이펙터 설정부는 상기 멀티로터에 작용하는 모멘트 를 감소하는 방향으로 상기 엔드 이펙터가 이동되도록 하며, 하기 수학식에 따른 상기 엔드 이펙터의 최적 위치를 안내하는 것을 특징으로 하는 오퍼레이팅 장치, 여기서, 는 상기 엔드 이펙터의 현재 위치이며, 는 가중 파라미터이고, 는 상기 로봇팔의 작업영역에 대한 사용자 정의 부분집합임. |
| 10 | 멀티로터에 로봇팔이 부착된 비행 매니퓰레이터를 이용하여 기구적 구조물을 오퍼레이팅하는 방법으로서, 위치 획득부가 상기 비행 매니퓰레이터에 관한 위치정보를 획득하는 단계;엔드 이펙터 속도 추정부가 상기 위치정보로부터 상기 로봇팔의 끝단에 설치된 엔드 이펙터의 속도를 추정하는 단계;방향 필터가 상기 엔드 이펙터의 속도를 이용하여 상기 기구적 구조물의 이동 방향을 추정하는 단계; 컨트롤러가 추정된 상기 이동 방향에 상응하여 상기 멀티로터의 추력 및 모멘트를 산출하여 상기 멀티로터를 제어하는 단계; 이상력 설정부가 상기 엔드 이펙터의 속도를 이용하여 상기 기구적 구조물을 미리 지정된 이상적인 속도로 이동시키는 이상력(desired force)을 설정하는 단계; 및상기 컨트롤러가 상기 이상력을 이용하여 상기 멀티로터의 위치 및 자세를 조작하는 단계를 포함하는 기구적 구조물 오퍼레이팅 방법. |
| 11 | 삭제 |
| 12 | 제10항에 있어서,상기 기구적 구조물은 이동 방향이 제한적으로 허용되는 기구적 제한을 가지는 것을 특징으로 하는 기구적 구조물 오퍼레이팅 방법. |
| 13 | 제12항에 있어서,상기 기구적 구조물은 상기 이동 방향과 상기 기구적 구조물의 기구적 특성이 사전에 제공되지 않는 미지의 구조물인 것을 특징으로 하는 기구적 구조물 오퍼레이팅 방법. |
| 14 | 제10항에 있어서,엔드 이펙터 설정부가 상기 이상력과 상기 엔드 이펙터의 위치를 이용하여 상기 엔드 이펙터의 궤도를 설정하는 단계를 더 포함하는 기구적 구조물 오퍼레이팅 방법. |
| 15 | 제10항에 있어서,상기 비행 매니퓰레이터는 연결 부위(joint)가 축에 대해 회전하는 로봇팔을 가지고 있으며, 상기 엔드 이펙터는 상기 멀티로터의 질량 중심에 위치하는 프레임 의 평면()에서 움직이도록 허용되는 것을 특징으로 하는 기구적 구조물 오퍼레이팅 방법. |
| 16 | 제10항에 있어서,상기 이동 방향 추정 단계는 다음 수학식에 따라 상기 기구적 구조물의 이동 방향을 추정하는 것을 특징으로 하는 기구적 구조물 오퍼레이팅 방법,여기서, 는 상기 기구적 구조물의 이동 방향이고, 는 상기 방향 필터의 대역폭을 결정하는 파라미터이고, 는 상기 엔드 이펙터의 속도임. |
| 17 | 제16항에 있어서,상기 이동 방향 추정 단계는 다음 수학식에 따라 상기 이동 방향을 변환하여 상기 컨트롤러에서 이용되도록 하는 것을 특징으로 하는 기구적 구조물 오퍼레이팅 방법,여기서, 는 상기 기구적 구조물의 이상적인 요(yaw) 각도임. |
| 18 | 제14항에 있어서,상기 엔드 이펙터 궤도 설정 단계는 상기 멀티로터에 작용하는 모멘트 를 감소하는 방향으로 상기 엔드 이펙터가 이동되도록 하며, 하기 수학식에 따른 상기 엔드 이펙터의 최적 위치를 안내하는 것을 특징으로 하는 기구적 구조물 오퍼레이팅 방법,여기서, 는 상기 엔드 이펙터의 현재 위치이며, 는 가중 파라미터이고, 는 상기 로봇팔의 작업영역에 대한 사용자 정의 부분집합임. |
| 19 | 제10항, 제12항 내지 제18항 중 어느 한 항에 기재된 기구적 구조물 오퍼레이팅 방법을 수행하기 위해 디지털 처리 장치에 의해 판독될 수 있는 프로그램을 기록한 기록매체. |