| 번호 | 청구항 |
|---|---|
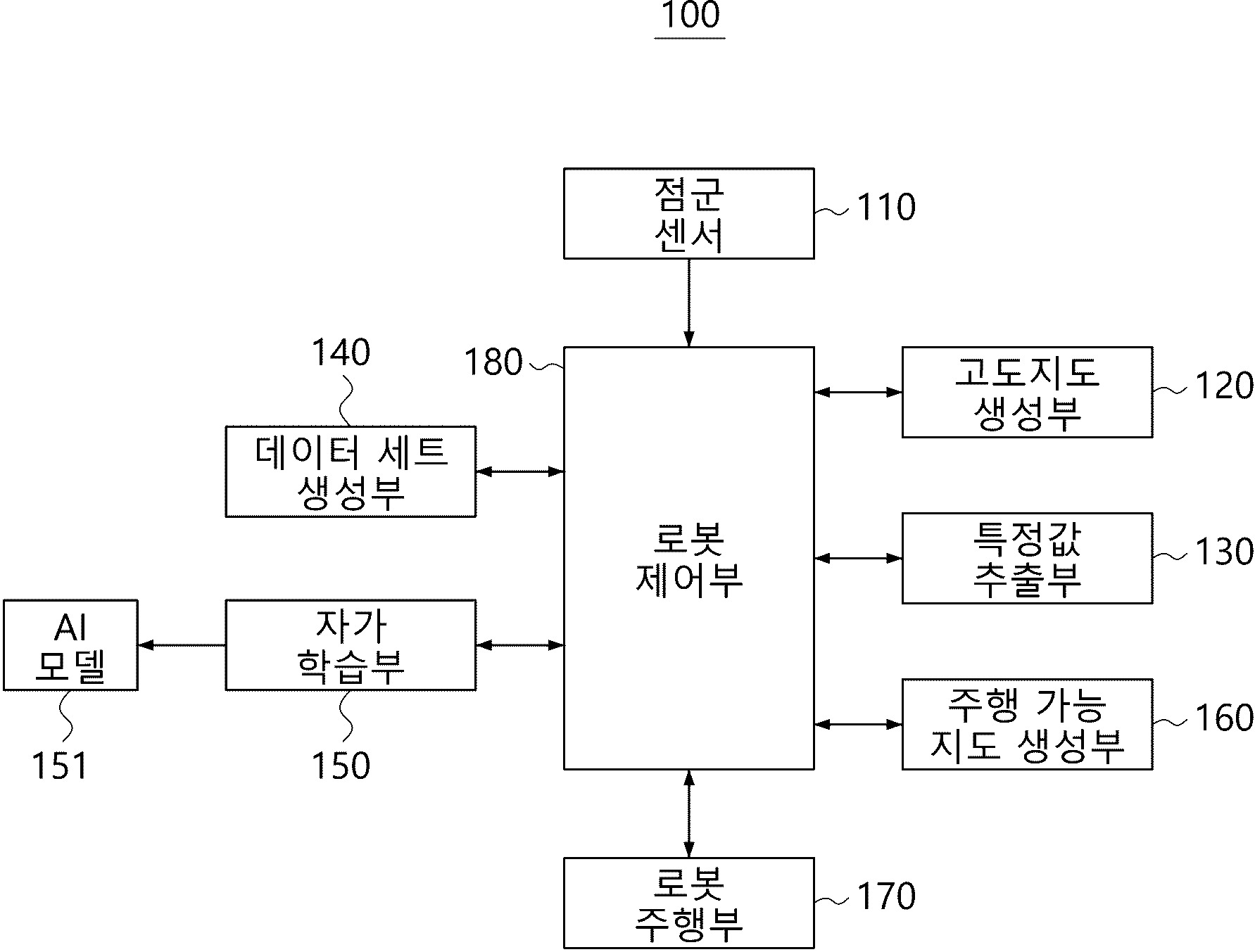
| 1 | 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇에 있어서,점군 데이터에 이용하여 격자 기반의 고도지도를 생성하는 고도지도 생성부와;상기 고도지도로부터 상기 격자별로 복수 유형의 특징값을 추출하는 특징값 추출부와;복수 유형의 상기 특징값 중 적어도 2 이상의 유형이 레이블용 특징값으로 설정되고, 상기 레이블용 특징값에 기반하여, 학습을 위해 레이블링된 레이블 데이터 세트와, 레이블링되지 않은 언레이블 데이터 세트를 생성하는 데이터 세트 생성부와;상기 레이블 데이터 세트와 언레이블 데이터 세트를 이용한 자가 학습을 통해 주행 가능성 평가를 위한 AI 모델을 생성하는 자가 학습부를 포함하고,상기 데이터 세트 생성부는상기 레이블용 특징값이 기 등록된 임계값을 초과하는 격자를 주행 불가능으로 판단하여 해당 격자의 복수의 상기 특징값 모두를 음성으로 레이블링하고, 상기 레이블용 특징값이 상기 임계값 이하인 격자를 주행 가능으로 판단하여 해당 격자의 복수의 상기 특징값 모두를 양성으로 레이블링하여 상기 레이블 데이터 세트를 생성하되,양성으로 레이블링되는 격자는 상기 이동 로봇의 기 주행 궤적 상에서만 추출하며;상기 레이블 데이터 세트에 포함되지 않는 나머지 격자들의 상기 복수의 특징값을 상기 언레이블 데이터 세트로 생성하는 것을 특징으로 하는 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 특징값은 상기 격자의 절대 높이 차이값, 상기 격자의 기울기값, 상기 격자의 곡률값, 상기 격자의 거칠기값 및 상기 격자의 모서리 특징값을 포함하며;상기 레이블용 특징값은 상기 절대 높이 차이값 및 상기 기울기값을 포함하는 것을 특징으로 하는 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇. |
| 4 | 제3항에 있어서,상기 데이터 세트 생성부는 상기 절대 높이 차이값과 상기 기울기값이 모두 상기 임계값을 초과하는 경우, 해당 격자를 주행 불가능으로 평가하는 것을 특징으로 하는 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇. |
| 5 | 제1항에 있어서,상기 자가 학습부는(a) 상기 레이블 데이터 세트를 학습 데이터로 하여 AI 기반의 분류기를 학습시키는 단계와,(b) 상기 (a) 단계에서 학습된 분류기에 상기 언레이블 데이터 세트를 입력 데이터로 입력시켜 상기 언레이블 데이터 세트를 구성하는 격자의 주행 가능 여부를 추론하는 단계와,(c) 상기 (b) 단계의 추론 결과에 기초하여, 상기 언레이블 데이터 세트를 구성하는 격자를 주행 가능 격자, 주행 불가능 격자 및 보류 격자로 분류하는 단계와,(d) 상기 주행 가능 격자의 복수의 상기 특징값을 양성으로 레이블링하고, 상기 주행 불가능 격자의 복수의 상기 특징값을 음성으로 레이블링하여 상기 레이블 데이터 세트에 추가시키는 단계와,(e) 상기 보류 격자의 복수의 상기 특징값으로 상기 언레이블 데이터 세트를 재생성하는 단계를 순차적으로 수행하되;상기 (a) 단계 내지 상기 (e) 단계를 기 설정된 종료 조건이 만족할 때까지 반속 수행하여 상기 (a) 단계에서 학습된 분류기를 상기 AI 모델로 생성하는 것을 특징으로 하는 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇. |
| 6 | 제5항에 있어서,상기 자가 학습부는 상기 (c) 단계에서 상기 (b) 단계의 추론 결과에 따른 확률값에 따라 상기 언레이블 데이터 세트를 구성하는 격자를 상기 주행 가능 격자, 상기 주행 불가능 격자 및 상기 보류 격자로 분류하는 것을 특징으로 하는 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇. |
| 7 | 제5항에 있어서,상기 자가 학습부는 상기 (e) 단계에서 상기 언레이블 데이터 세트로 재생성되는 상기 보류 격자의 개수가 기 설정된 기준 개수 이하인 경우 상기 종료 조건이 만족하는 것으로 평가하는 것을 특징으로 하는 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇. |
| 8 | 제1항, 또는 제3항 내지 제7항 중 어느 한 항에 있어서,상기 이동 로봇의 새로운 주행 중에 상기 고도지도 생성부가 새로이 획득한 점군 데이터로 새로운 고도 지도를 생성하도록 제어하고, 상기 새로운 고도지도로부터 복수 유형의 새로운 특징값을 추출하도록 상기 특징값 추출부를 제어하고, 상기 새로운 특징값을 상기 AI 모델의 입력 데이터로 하여 각 격자의 주행 가능 여부가 추론되도록 상기 AI 모델을 제어하는 로봇 제어부와,상기 AI 모델에 의해 추론되는 각 격자의 주행 가능 여부에 기초하여, 주행 가능 지도를 생성하는 주행 가능 지도 생성부를 더 포함하는 것을 특징으로 하는 자가 학습 기반의 주행 가능성을 평가하는 이동 로봇. |