| 번호 | 청구항 |
|---|---|
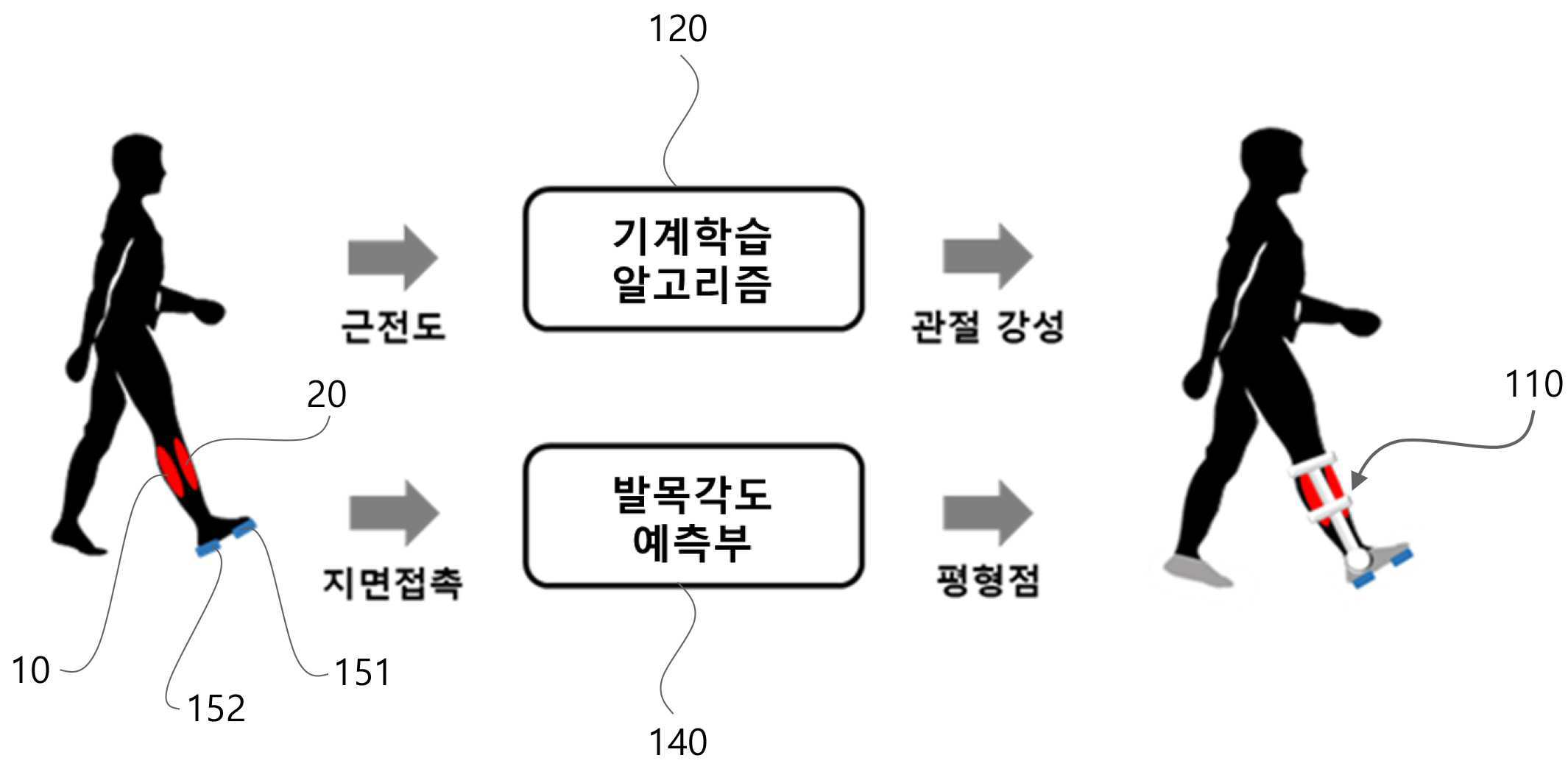
| 1 | 보행자의 발에 착용되어 보행을 보조하는 보행 보조 로봇과,발목의 움직임과 연관된 복수의 근육에 각각 부착되어 근전도를 감지하는 복수의 근전도 센서와,상기 근전도 센서에 의해 감지된 근전도 신호를 입력받아 기계 학습 알고리즘을 통해 상기 보행 보조 로봇의 발목 관절에 적용될 예측 강성을 출력하는 강성 예측부와,상기 강성 예측부로부터 출력된 상기 예측 강성에 기초하여 상기 보행 보조 로봇의 발목 관절의 강성을 제어하는 로봇 제어부를 포함하고;상기 기계 학습 알고리즘은 다수의 보행자의 근육에서 측정된 학습 근전도 신호와, 해당 학습 근전도 신호에 따른 학습 강성 신호를 학습 데이터로 하되 상기 학습 강성 신호를 출력으로 하여 기계 학습되어 생성되고;상기 기계 학습 알고리즘은 LSTM(Long-Short Term Memory) 알고리즘, 또는 CNN(Convolution Neural Network) 알고리즘을 포함하며;상기 강성 예측부는상기 학습 근전도 신호 및 상기 학습 강성 신호를 기 설정된 개수 또는 시간 단위로 시간에 따라 중첩하여 상기 기계 학습 알고리즘에 상기 학습 데이터로 입력하고;상기 근전도 센서에 의해 감지된 상기 근전도 신호를 상기 개수 또는 시간 단위로 중첩하여 상기 기계 학습 알고리즘에 입력하는 것을 특징으로 하는 보행 보조 시스템. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 제1항에 있어서,상기 보행자의 보행시 상기 보행자의 발바닥의 지면 접촉 여부를 감지하는 복수의 접촉 센서와,복수의 상기 접촉 센서의 감지 결과에 기초하여, 상기 보행 보조 로봇의 발목 관절의 각도를 예측하는 발목 각도 예측부를 더 포함하며;상기 로봇 제어부는 상기 발목 각도 예측부에 의해 예측된 각도로 상기 보행 보조 로봇의 발목 각도를 제어하는 것을 특징으로 하는 보행 보조 시스템. |
| 5 | 제4항에 있어서,상기 접촉 센서는상기 보행자의 발끝 영역이 지면에 접촉되는지 여부를 감지하는 제1 접촉 센서와,상기 보행자의 뒷꿈치 영역이 지면에 접촉되는지 여부를 감지하는 제2 접촉 센서를 포함하며;상기 발목 각도 예측부는 상기 제1 접촉 센서 및 상기 제2 접촉 센서에 의해 감지되는 접촉 여부의 조합에 따라 상기 보행 보조 로봇의 발목 각도를 예측하는 것을 특징으로 하는 보행 보조 시스템. |