| 번호 | 청구항 |
|---|---|
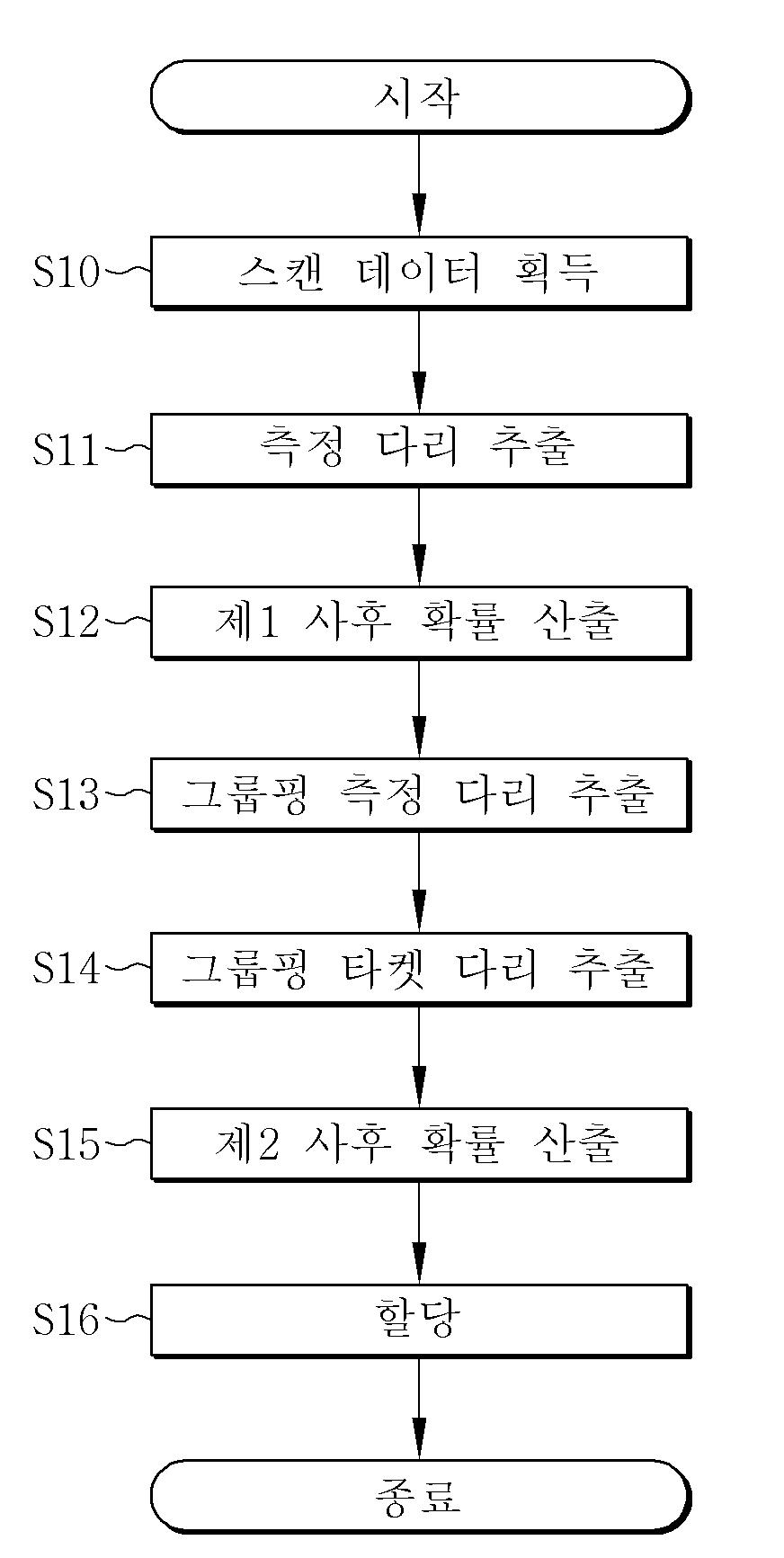
| 1 | (a) 거리 센서에 의해 스캔되는 스캔 데이터들로부터 현재 타임 스텝에서의 사람의 다리에 해당하는 복수의 측정 다리가 추출되는 단계와;(b) 상기 복수의 측정 다리와 현재 타임 스텝에서의 복수의 타겟 다리가 SJPDAF 기법에 적용되어, 상기 복수의 타겟 다리와 상기 복수의 측정 다리 간의 매칭들에 대한 제1 사후 확률이 산출되는 단계와;(c) 상기 복수의 타켓 다리가 한 쌍씩으로 그룹핑되어 적어도 하나의 그룹핑 타겟 다리가 추출되는 단계와;(d) 상기 복수의 측정 다리가 한 쌍씩으로 조합 가능하게 그룹핑되어 복수의 그룹핑 측정 다리가 추출되는 단계와;(e) 상기 그룹핑 타겟 다리와 상기 복수의 그룹핑 측정 다리가 SJPDAF 기법에 적용되되 상기 제1 사후 확률이 반영되어, 상기 그룹핑 타겟 다리와 상기 복수의 그룹핑 측정 다리 간의 매칭들에 대한 제2 사후 확률이 산출되는 단계와;(f) 상기 제2 사후 확률에 기초하여, 상기 그룹핑 타겟 다리가 상기 복수의 그룹핑 측정 다리 중 어느 하나로 할당되는 단계를 포함하는 것을 특징으로 하는 다리 추종 방법. |
| 2 | 제1항에 있어서,상기 (c) 단계에서 상기 그룹핑 타겟 다리는 상기 타겟 다리를 공유하지 않도록 그룹핑되는 것을 특징으로 하는 다리 추종 방법. |
| 3 | 제1항에 있어서,상기 (d) 단계에서 상기 그룹핑 측정 다리는 상기 측정 다리를 원소로 하는 집합의 부분 집합 중 2개의 원소를 갖는 부분 집합에 해당하는 조합으로 추출되는 것을 특징으로 하는 다리 추종 방법. |
| 4 | 제1항에 있어서,상기 제2 사후 확률은 수학식(여기서, αqp는 상기 제2 사후 확률이고, 는 상기 제2 사후 확률에 대한 조인 어소시에이션 이벤트이고, θ(k)는 상기 제1 사후 확률에 대한 조인 어소시에이션 이벤트이고, 는 θ(k)에서 z(k)가 오경보(False alarm)가 발생할 확률이고, η는 정규화(Normalization) 값이고, z(k)는 시간 k에서 m(k) 개로 검출된 측정 다리이고, 는 와 θ(k)의 우도 함수(Likelihood function)이고, 상기 수학식의 오른쪽 항목은 상기 제1 사후 확률에 기초하여 산출된다)에 의해 산출되는 것을 특징으로 하는 다리 추종 방법. |