| 번호 | 청구항 |
|---|---|
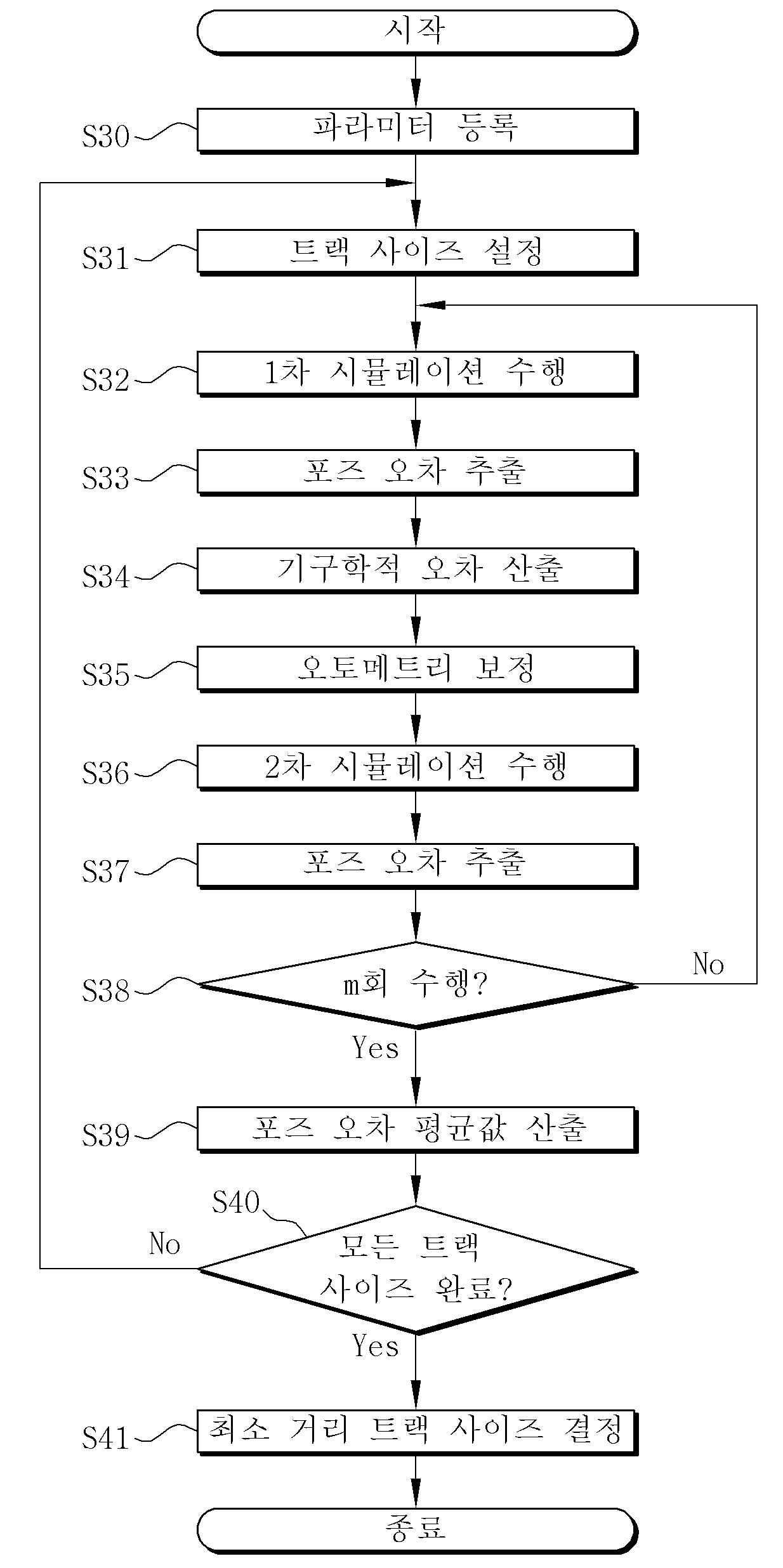
| 1 | (a) 이동 로봇의 제원과, 상기 이동 로봇에 대해 기 측정된 시스템적 오차 파라미터 및 비시스템적 오차 파라미터가 등록되는 단계와;(b) 상기 (a) 단계에서의 등록 상태에서 기 설정된 트랙 형상과 기 설정된 트랙 사이즈를 갖는 예비 테스트 트랙에서의 1차 주행 시뮬레이션이 수행되어, 포즈 오차가 추출되는 단계와;(c) 상기 (b) 단계에서 추출된 포즈 오차에 기초한 오도메트리 보정이 주행 시뮬레이션에 적용되는 단계와;(d) 상기 오도메트리 보정이 적용된 2차 주행 시뮬레이션이 상기 예비 테스트 트랙에서 수행되어, 포즈 오차가 추출되는 단계와;(e) 상기 (b) 단계 내지 상기 (d) 단계가 복수 회 수행되어 상기 (d) 단계에서 추출된 포즈 오차의 평균값이 산출되는 단계와;(f) 상호 상이한 크기의 다수의 트랙 사이즈에 대해 상기 (b) 단계 내지 상기 (e) 단계가 수행되어 상기 각 트랙 사이즈에 대한 포즈 오차의 평균값들이 산출되는 단계와;(g) 상기 포즈 오차의 평균값 중 통계적으로 의미있게 감소하지 않는 특이값을 갖는 트랙 사이즈를 최적의 트랙 사이즈로 결정되는 단계를 포함하는 것을 특징으로 하는 이동 로봇의 오도메트리 보정을 위한 테스트 트랙 결정 방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 (a) 단계에서 상기 시스템적 오차 파라미터 및 상기 비시스템적 오차 파라미터는 상기 1차 시뮬레이션 및 상기 2차 시뮬레이션에 적용된 상기 테스트 트랙의 형상을 갖는 실제 트랙에서의 다수의 주행 시험을 통해 측정된 포즈 오차 및 해당 포즈 오차의 분포에 기초하여 측정되는 것을 특징으로 하는 오도메트리 보정을 위한 테스트 트랙 결정 방법. |