| 번호 | 청구항 |
|---|---|
| 9 | 제1항, 또는 제3항 내지 제8항 중 어느 한 항에 있어서,상기 자율 이동 로봇의 주행에 대한 운동 모델은 오도메트리(Odometry) 운동 모델이 적용되는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 10 | 제4항 내지 제8항 중 어느 한 항에 있어서,상기 (b22) 단계는(b221) 해당 경로 포인트에서의 상기 자율 이동 로봇의 위치 추정에 적용 가능한 적어도 하나의 상기 위치 추정 센서 중 어느 하나를 선택하는 단계와;(b222) 상기 선택된 위치 추정 센서에 대한 상기 센서 확률이 할당되는 단계를 포함하는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 11 | 제10항에 있어서,상기 (b221) 단계는상기 제2 샘플의 공분산 행렬의 최대 고유값에 대한 고유 벡터를 산출하는 단계와,상기 제2 샘플들의 중심점을 검출하는 단계와;상기 중심점과 상기 위치 추정 센서를 연결하는 직선과 상기 고유 벡터가 이루는 각도를 산출하는 단계와;상기 산출된 각도 중 가장 작은 각도를 갖는 위치 추정 센서가 선택되는 단계를 포함하는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 1 | 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법에 있어서,(a) 출발 위치와 목표 위치에 대한 복수의 예비 경로를 생성하는 단계와;(b) 상기 자율 이동 로봇의 주행에 대한 모션 불확실성과, 상기 예비 경로 상에 상기 자율 이동 로봇의 위치 감지를 위해 배치된 적어도 하나의 위치 추정 센서에 대한 센서 불확실성을 조합하여, 상기 각 예비 경로에 대한 적어도 하나의 조합 불확실성을 산출하는 단계와;(c) 상기 각 예비 경로에 대해 산출된 상기 조합 불확실성을 이용하여 상기 복수의 예비 경로 각각에 대한 경로 비용을 산출하는 단계와;(d) 상기 복수의 예비 경로 각각에 대해 산출된 상기 경로 비용을 비교하여 상기 복수의 예비 경로 중 최종 경로를 생성하는 단계를 포함하고,상기 (b) 단계에서 상기 조합 불확실성은 기 설정된 위치 추정 알고리즘에 따른 상기 모션 불확실성의 산출 과정에 상기 센서 불확실성에 따른 센서 확률이 적용되어 산출되는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 (b) 단계에서 상기 위치 추정 알고리즘은 몬테카를로 위치 추정(Monte Carlo Localization : MCL) 알고리즘이 적용되는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
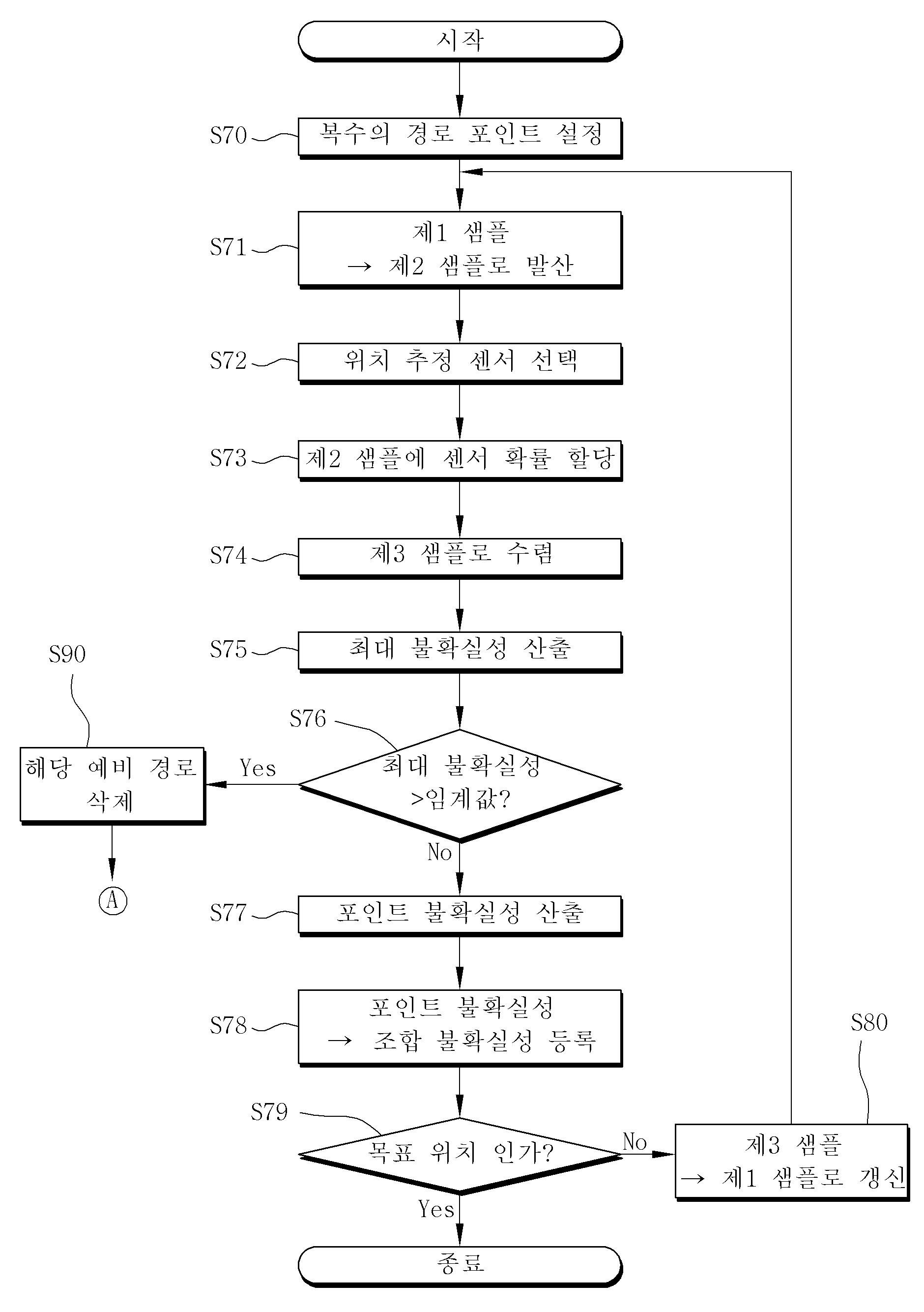
| 4 | 제3항에 있어서,상기 (b) 단계는(b1) 상기 각 예비 경로에 복수의 경로 포인트를 설정하는 단계와;(b2) 상기 각 경로 포인트에 대해, (b21) 상기 몬테카를로 위치 추정(Monte Carlo Localization : MCL) 알고리즘에 기초하여 기 설정된 개수의 제1 샘플이 상기 모션 불확실성이 반영된 제2 샘플로 발산하는 단계와, (b22) 상기 제2 샘플 각각에 상기 센서 확률이 할당되는 단계와, (b23) 상기 센서 확률이 할당된 상기 제2 샘플이 상기 몬테카를로 위치 추정(Monte Carlo Localization : MCL) 알고리즘에 기초하여 제3 샘플로 수렴하는 단계와, (b24) 상기 제3 샘플에 기초하여 포인트 불확실성이 산출되는 단계가 적용되는 단계와;(b3) 상기 각 경로 포인트에 대한 상기 포인트 불확실성이 상기 복수의 조합 불확실성으로 산출되는 단계를 포함하는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 5 | 제4항에 있어서,상기 (b24) 단계에서 상기 포인트 불확실성은 상기 제3 샘플의 공분산 행렬의 대각합(Trace)에 의해 산출되는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 6 | 제5항에 있어서,상기 (c) 단계는(c1) 상기 각 경로 포인트에 대해 산출된 상기 포인트 불확실성들의 평균을 평균 불확실성으로 산출하는 단계와;(c2) 상기 목표 위치에 대해 산출된 상기 포인트 불확실성을 최종점 불확실성으로 설정하는 단계와;(c3) 상기 평균 불확실성과 상기 최종점 불확실성의 가중치 합에 따라 상기 경로 비용을 산출하는 단계를 포함하는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 7 | 제6항에 있어서,상기 (b2) 단계는상기 제3 샘플의 공분산 행렬의 고유값(Eigenvalue)을 최대 불확실성으로 산출하는 단계와;상기 최대 불확실성이 기 설정된 임계값 이상인 경우, 해당 예비 경로를 제거하는 단계를 더 포함하는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |
| 8 | 제4항에 있어서,상기 (b22) 단계에서 상기 센서 확률은 해당 경로 포인트와 상기 위치 추정 센서와의 거리를 평균으로 하는 정규 분포 모델에 의해 산출되는 것을 특징으로 하는 불확실성을 이용한 자율 이동 로봇의 경로 생성 방법. |