| 번호 | 청구항 |
|---|---|
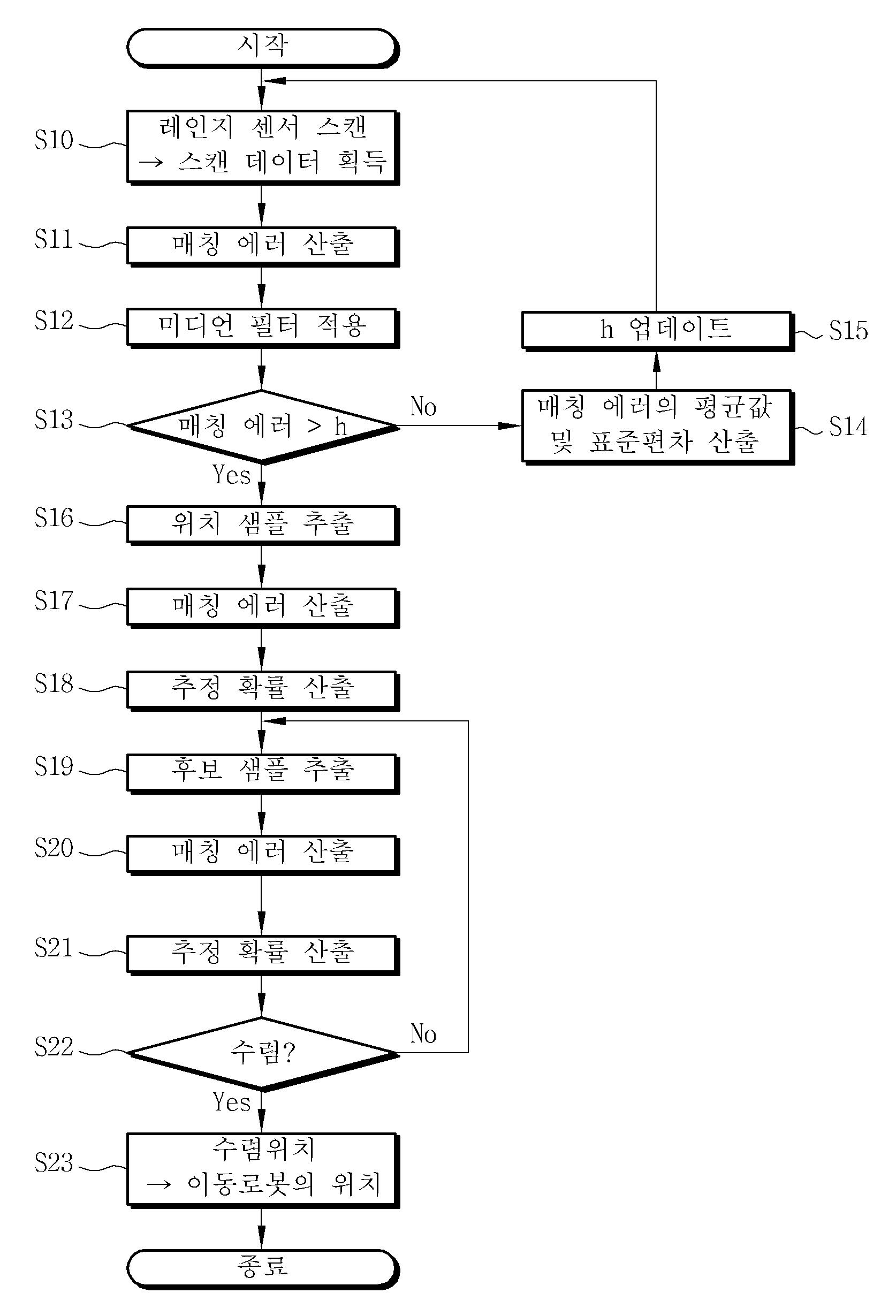
| 1 | 이동 로봇의 위치 추정 방법에 있어서,(a) 레인지 센서의 스캔에 따라 스캔 데이터가 획득되는 단계와;(b) 상기 스캔 데이터에 기초한 스캔 범위 영역과, 기 등록된 환경 지도로부터 예측되는 예측 데이터에 기초한 예측 범위 영역 간의 편차에 기초하여 매칭 에러를 산출하는 단계와;(c) 상기 (b) 단계에서 산출된 상기 매칭 에러가 에러 문턱치를 초과하는지 여부에 따라 위치 추정 실패 여부를 판단하는 단계와;(d) 상기 (c) 단계에서 위치 추정 실패로 판단된 경우, 상기 환경 지도 상의 적어도 일 영역으로부터 추출된 복수의 위치 샘플 각각에 대해 매칭 에러를 산출하는 단계와;(e) 상기 (d) 단계에서 산출된 상기 매칭 에러를 기 설정된 확률 밀도 함수에 적용하여 상기 이동 로봇의 위치를 추정하는 단계를 포함하며,상기 매칭 에러는 수학식 (여기서, Em(x)는 상기 매칭 에러이고, 는 시간 t에서의 j번째 상기 스캔 데이터이고, 는 시간 t에서의 j번째 상기 예측 데이터이고, 는 시간 t에서의 j번째 상기 스캔 범위 영역이고, 는 시간 t에서의 j번째 상기 예측 범위 영역이고, Δθ는 상기 레인지 센서의 각 해상도(Angular resolution)이다)에 의해 산출되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 2 | 제1항에 있어서,상기 (d) 단계에서 상기 복수의 위치 샘플은 기 등록된 모션 모델에 기초한 최대 모션 경계 영역 내에서 추출되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 3 | 이동 로봇의 위치 추정 방법에 있어서,(a) 레인지 센서의 스캔에 따라 스캔 데이터가 획득되는 단계와;(b) 상기 스캔 데이터와, 기 설정된 환경 지도에 기초하여 예측되는 예측 데이터에 기초하여 매칭 에러를 산출하는 단계와;(c) 상기 (b) 단계에서 산출된 상기 매칭 에러가 에러 문턱치를 초과하는지 여부에 따라 위치 추정 실패 여부를 판단하는 단계와;(d) 상기 (c) 단계에서 위치 추정 실패로 판단된 경우, 기 등록된 모션 모델에 기초한 최대 모션 경계 영역 내에서 추출되는 복수의 위치 샘플 각각에 대해 매칭 에러를 산출하는 단계와;(e) 상기 (d) 단계에서 산출된 상기 매칭 에러를 기 설정된 확률 밀도 함수에 적용하여 상기 이동 로봇의 위치를 추정하는 단계를 포함하고,상기 (b) 단계는,상기 스캔 데이터에 기초하여 스캔 범위 영역을 산출하는 단계와;상기 예측 데이터에 기초하여 예측 범위 영역을 산출하는 단계와;상기 스캔 범위 영역과 상기 예측 범위 영역 간의 편차에 기초하여 상기 매칭 에러를 산출하는 단계를 포함하며,상기 매칭 에러는 수학식 (여기서, Em(x)는 상기 매칭 에러이고, 는 시간 t에서의 j번째 상기 스캔 데이터이고, 는 시간 t에서의 j번째 상기 예측 데이터이고, 는 시간 t에서의 j번째 상기 스캔 범위 영역이고, 는 시간 t에서의 j번째 상기 예측 범위 영역이고, Δθ는 상기 레인지 센서의 각 해상도(Angular resolution)이다)에 의해 산출되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 4 | 삭제 |
| 5 | 삭제 |
| 6 | 제2항 또는 제3항에 있어서,상기 (b) 단계에서 상기 예측 데이터는 레이-캐스팅 알고리즘(Ray-casting algorithm)을 통해 상기 환경 지도로부터 계산되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 7 | 제2항 또는 제3항에 있어서,상기 에러 문턱치는 상기 레인지 센서의 이전 스캔 동작들에 대한 상기 (b) 단계의 수행을 통해 산출된 매칭 에러의 통계값에 기초하여 업데이트되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 8 | 제7항에 있어서,상기 에러 문턱치에는 상기 환경 지도의 그리드 해상도에 기초하여 결정되는 에러 기준치가 오차 범위로 반영되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 9 | 제8항에 있어서,상기 에러 문턱치는 수학식(여기서, h는 상기 에러 문턱치이고, 는 (i-k) 번째 스캔에서 i번째 스캔까지의 상기 매칭 에러의 평균값이고, 는 (i-k) 번째 스캔에서 i번째 스캔까지의 상기 매칭 에러의 표준편차이고, bias는 상기 환경 지도의 그리드 해상도에 기초하여 결정되는 에러 기준치이다)에 의해 산출되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 10 | 제2항 또는 제3항에 있어서,상기 (b) 단계에서 산출된 매칭 에러는 미디언 필터(Median filter)에 의해 필터링되어 상기 (c) 단계에 반영되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 11 | 제2항 또는 제3항에 있어서,상기 모션 모델은 가우시안 확률 분포를 갖는 모션 모델이 적용되며;상기 최대 모션 경계 영역은 상기 (c) 단계의 수행을 통한 직전 위치 추정 성공 위치를 중심으로 상기 모션 모델에 기초하여 산출되는 최대 이동 거리를 반경으로 하는 원 형태로 설정되는 것을 특징으로 이동 로봇의 위치 추정 방법. |
| 12 | 제11항에 있어서,상기 최대 이동 거리는 수학식(여기서, Smax는 상기 최대 이동 거리이고, σ는 상기 모션 모델의 표준 편차이고, Δsi는 상기 이동 로봇의 휠 엔코더로부터 측정된 이동 거리이다)에 의해 산출되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 13 | 제2항 또는 제3항에 있어서,상기 (e) 단계는,(e1) 상기 (d) 단계에서 산출된 상기 매칭 에러를 상기 확률 밀도 함수에 적용하여 상기 각 위치 샘플에 대한 추정 확률을 산출하는 단계와;(e2) 상기 산출된 추정 확률에 기초하여 후보 샘플을 추출하는 단계와;(e3) 상기 추출된 후보 샘플에 대한 매칭 에러를 산출하는 단계와;(e4) 상기 (e3) 단계에서 산출된 상기 매칭 에러를 상기 확률 밀도 함수에 적용하여 상기 각 후보 샘플에 대한 추정 확률을 산출하는 단계와;(e4) 상기 (e2) 단계, 상기 (e3) 단계 및 상기 (e4) 단계의 반복적인 수행을 통해 수렴되는 수렴 위치를 상기 이동 로봇의 위치로 추정하는 단계를 포함하는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |
| 14 | 제13항에 있어서,상기 확률 밀도 함수는 포화 가우시안 함수(Saturated Gaussian function)가 적용되며, 수학식(여기서, p(Em(x))는 상기 위치 샘플 또는 상기 후보 샘플의 추정 확률이고, η는 노르말라이저(Normalizer)이고, σt는 시간 t에서 상기 위치 샘플 또는 상기 후보 샘플에 대한 상기 매칭 에러의 표준편차이고, μt는 시간 t에서 상기 위치 샘플 또는 상기 후보 샘플에 대한 상기 매칭 에러의 평균값이고, bias는 상기 환경 지도의 그리드 해상도에 기초하여 결정되는 에러 기준치이다)로 표현되는 것을 특징으로 하는 이동 로봇의 위치 추정 방법. |