| 번호 | 청구항 |
|---|---|
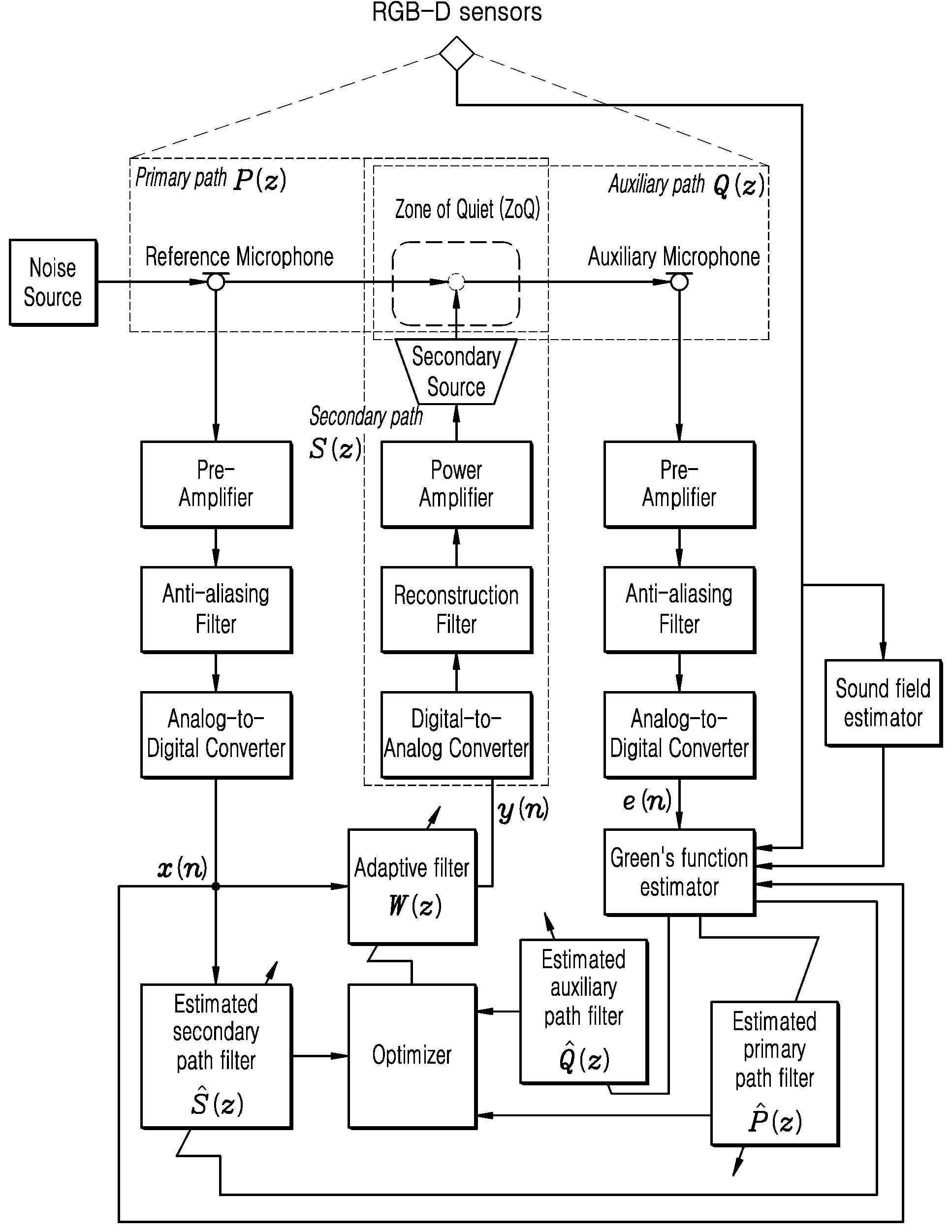
| 1 | 소음 발생 부위에서 발생한 소음이 정숙 영역에서 감지되지 않도록 작동하는 비착용형 능동 소음 저감 시스템의 작동 방법에 있어서,튜닝 단계(S10) 및 활성화 단계(S20)를 포함하고,상기 튜닝 단계(S10)는,RGB-D 카메라를 이용하여 공간 정보 데이터를 획득하는 단계(S11);상기 공간 정보 데이터를 기반으로 방의 구조 데이터를 산출하여 음장 추정기에 입력하는 단계(S12);제1 기계 학습 모델을 이용하여 상기 공간 정보 데이터를 통해 가구의 종류 및 소재를 파악하여 상기 음장 추정기에 입력하는 단계(S13);상기 음장 추정기를 이용하여 3차원 공간 내에서 소음 발생 부위와 정숙 영역을 설정하고, 시뮬레이션을 수행하여 방과 가구의 흡음률, 반사율 및 음향 임피던스를 포함하는 룸 어쿠스틱 분석 결과를 획득하는 단계(S14)를 포함하고,상기 활성화 단계(S20)는,소음 발생 부위에서 발생한 소음을 기준 마이크로폰으로 수집하는 단계(S21);상기 RGB-D 카메라를 통해 소음 발생 부위와 정숙 영역의 위치를 파악하는 단계(S22);제2 기계 학습 모델을 내장하고 있는 그린함수 추정기를 이용하여 상기 단계(S14)의 룸 어쿠스틱 분석 결과, 상기 단계(S21)에서 수집된 소음 및 상기 단계(S22)에서 파악된 소음 발생 부위와 정숙 영역의 위치를 종합하여 주경로, 부경로 및 추정 보조경로 그린함수를 실시간으로 업데이트하는 단계(S23);최적화기를 이용하여 상기 단계(S23)에서 업데이트된 추정 그린함수들을 바탕으로 적응 필터를 업데이트하는 단계(S24); 및상기 업데이트된 적응 필터에 따라 상쇄 스피커로 상쇄음을 재생하는 단계(S25)를 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 2 | 제1항에 있어서,상기 튜닝 단계(S10)는 사람이 존재하지 않고, 소음 발생 부위와 정숙 영역이 미정인 정적인 상태에서 수행되는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 3 | 제1항에 있어서,상기 튜닝 단계(S10)는 사용자 부재시 테스트 음향 송수신 또는 네트워크를 통한 주서버와의 통신을 통해 상기 단계(S14)에서 수행된 시뮬레이션을 통해 획득된 룸 어쿠스틱 분석 결과를 검증하는 단계(S15)를 더 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 4 | 제1항에 있어서,상기 공간 정보 데이터는 RGB 이미지, 깊이 지도 및 점군 데이터를 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 5 | 제1항에 있어서,상기 활성화 단계(S20)는 보조 마이크로폰을 이용하여 정숙 영역 부근에서의 소음을 수집하는 단계(S26) 및 상기 수집된 소음을 상기 그린함수 추정기로 입력하는 단계(S27)를 더 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 6 | 제5항에 있어서,상기 단계(S23)와 상기 단계(S24) 사이에, 상기 단계(S23)에서 업데이트된 추정 그린함수들을 이용하여 상기 기준 마이크로폰과 상기 보조 마이크로폰에서 수신된 소음을 필터링하는 단계(S23a)를 더 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 7 | 제6항에 있어서,상기 필터링 단계(S23a)는 추정 주경로 그린함수 필터, 추정 부경로 그린함수 필터 및 추정 보조경로 그린함수 필터를 이용하여 수행되는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 8 | 제7항에 있어서,상기 추정 주경로 그린함수 필터, 상기 추정 부경로 그린함수 필터 및 상기 추정 보조경로 그린함수 필터는 하기 수학식 1로 표현되는 연산을 수행하도록 구성된 비착용형 능동 소음 저감 시스템의 작동 방법:[수학식 1]x'(n) = s(n) * x(n)상기 수학식 1에서, x'(n)은 상기 추정 주경로 그린함수 필터, 상기 추정 부경로 그린함수 필터 또는 상기 추정 보조경로 그린함수 필터를 거친 출력 소음이고, s(n)은 추정 주경로 그린함수, 추정 부경로 그린함수 또는 추정 보조경로 그린함수이고, x(n)은 상기 기준 마이크로폰에서 수집된 소음 또는 상기 보조 마이크로폰에서 수집된 소음이고, *는 컨볼루션 연산자이다. |
| 9 | 제6항에 있어서,상기 최적화기는 상기 단계(S23a)에서 필터링된 소음을 기반으로 하기 수학식 2에 따라 적응 필터의 계수를 조정하도록 구성된 비착용형 능동 소음 저감 시스템의 작동 방법:[수학식 2]w(n+1)=w(n)+μ・e(n)・x(n)상기 수학식 2에서, n은 적응 필터의 업데이트가 이루어지는 시간 단계이고, e(n)은 보조 마이크로폰에서 수집된 소음이고, w(n)은 현재 시점(n)에서의 적응 필터의 계수이고, w(n+1)은 다음 시점(n+1)에서의 적응 필터의 계수이고, μ는 step size로, 필터 계수 업데이트의 크기를 결정하는 상수이고, x(n)은 필터링에 사용되는 입력 신호로, 주로 기준 마이크로폰에서 수집된 소음이다. |
| 10 | 제5항에 있어서,상기 적응 필터를 업데이트하는 단계(S24)는 상기 기준 마이크로폰과 상기 보조 마이크로폰에서 수신된 소음 및 주경로와 추정 보조경로 그린함수를 이용하여 수행되는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 11 | 제6항에 있어서,상기 비착용형 능동 소음 저감 시스템은 상기 정숙 영역에 가상의 오차 마이크로폰을 구현하도록 구성된 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 12 | 제5항에 있어서,상기 기준 마이크로폰에서 수집되는 소음을 바탕으로 상기 소음 발생 부위가 소음을 발생하는지 여부를 판단하는 단계(S28)를 더 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 13 | 제12항에 있어서,상기 단계(S28)에서 상기 소음 발생 부위가 소음을 발생하지 않는다고 판단한 경우, 상기 비착용형 능동 소음 저감 시스템의 작동을 종료하는 단계(S29)를 더 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 14 | 제1항에 있어서, 상기 제1 기계 학습 모델은 상기 RGB-D 센서로부터 방의 3차원 형상 및 각 요소의 재질을 입력받아 방 내부의 임의의 위치에서 발생한 소음이 다른 임의의 위치로 전달될 때의 소음을 예측하는 모델인 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 15 | 제1항에 있어서,상기 제2 기계 학습 모델은 상기 RGB-D 센서로부터 방의 3차원 형상, 각 요소의 재질, 소음 발생 부위의 위치 및 정숙 영역의 위치를 입력받아 소음 전파 경로의 그린함수를 예측하는 모델인 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 16 | 제1항에 있어서,상기 제1 기계 학습 모델 및 상기 제2 기계 학습 모델은 시뮬레이션 데이터 및 실제 실험 데이터를 기반으로 학습되는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 17 | 제1항에 있어서,상기 상쇄 스피커는 동적 드라이버, 밸런스드 아마추어 또는 초음파 파라메트릭 어레이 중 하나인 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 18 | 제1항에 있어서,상기 단계(S23) 또는 상기 단계(S24) 이전에, 상기 기준 마이크로폰에서 수집된 소음 및 상기 보조 마이크로폰에서 수집된 소음을 각각 초단 증폭기로 증폭하는 단계(SS11, SS21), 상기 증폭된 소음의 고주파 성분을 알리아싱 방지 필터 제거하여 알리아싱 현상을 방지하는 단계(SS12, SS22) 및 상기 필터링된 소음을 아날로그-디지털 변환기로 디지털 소음으로 변환하는 단계(SS13, SS23)를 더 포함하는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 19 | 제1항에 있어서,상기 단계(S25)는 상기 적응 필터의 출력 신호를 디지털-아날로그 변환기로 아날로그 신호로 변환하는 단계(SS31), 상기 아날로그 신호의 고주파 성분을 재구성 필터로 제거하여 신호 손실을 방지하는 단계(SS32) 및 상기 필터링된 아날로그 신호를 전력 증폭기로 증폭하는 단계(SS33)를 수행하도록 구성되는 비착용형 능동 소음 저감 시스템의 작동 방법. |
| 20 | 제1항 내지 제19항 중 어느 한 항에 따른 비착용형 능동 소음 저감 시스템의 작동 방법에 따라 작동되도록 구성된 비착용형 능동 소음 저감 시스템. |