| 번호 | 청구항 |
|---|---|
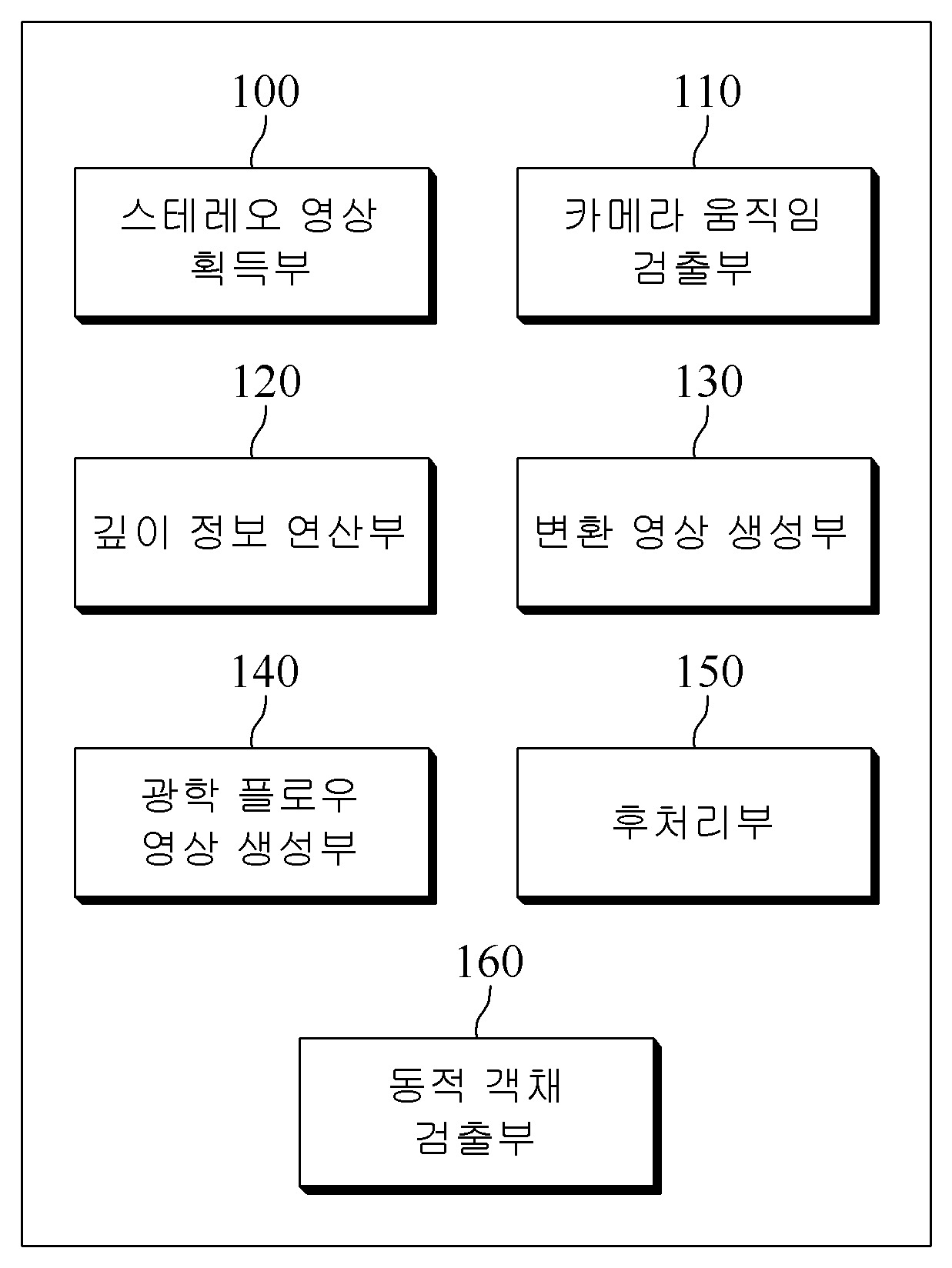
| 1 | 제1 프레임 영상 및 제2 프레임 영상의 스테레오 영상을 획득하는 영상 획득부;제1 프레임 및 제2 프레임 구간에서의 카메라 움직임을 검출하는 카메라 움직임 검출부;상기 제1 프레임 영상의 스테레오 영상을 이용하여 상기 제1 프레임 영상의 픽셀별 깊이를 획득하는 깊이 정보 연산부;상기 카메라 움직임 및 상기 픽셀별 깊이에 기초하여 상기 제1 프레임 영상을 변환한 변환 영상을 생성하는 변환 영상 생성부;상기 제2 프레임 영상 및 상기 변환 영상을 이용하여 광학 플로우 영상을 생성하는 광학 플로우 영상 생성부; 및상기 생성된 광학 플로우 영상을 이용하여 동적 객체를 검출하는 동적 객체 검출부를 포함하되,상기 카메라 움직임 검출부는 상기 카메라의 회전 움직임 및 직선 움직임을 독립적으로 검출하며,상기 변환 영상은 상기 카메라 움직임을 상기 제1 프레임 영상에 반영하여 변환한 영상이고,상기 변환 영상 생성부는 상기 회전 움직임 및 상기 직선 움직임을 독립적으로 적용하여 변환 영상을 생성하고,상기 변환 영상 생성부는 상기 회전 움직임에 기초하여 상기 제1 프레임 영상을 다음의 수학식과 같이 변환하는 것을 특징으로 하는 동적 객체 검출 장치. 위 수학식에서, ru는 제1 프레임 영상 픽셀 좌표 u에 대한 회전 움직임을 의미하고, rv는 제1 프레임 영상 픽셀 좌표 v에 대한 회전 움직임을 의미하며, yaw, pitch, roll은 검출된 회전 움직임 성분을 의미하고, 는 제1 프레임 영상의 수직축과 좌표(u.v)가 이루는 각도를 의미하고, FoV는 시야각을 의미하며, d는 각 픽셀에 대해 획득된 깊이 정보를 의미하고, s는 소실점에서 (u.v)까지의 거리를 의미하며, height는 제1 프레임 영상의 수직축 픽셀 수를 의미하고, width는 제1 프레임 영상의 수평축 픽셀 수를 의미함. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 제1항에 있어서,상기 변환 영상 생성부는 상기 직선 움직임에 기초하여 상기 제1 프레임 영상을 다음의 수학식과 같이 변환하는 것을 특징으로 하는 동적 객체 검출 장치. 위 수학식에서, tu 및 tv는 제1 프레임 영상 좌표 (u,v)의 u축 및 v축으로의 변환을 의미하고, d는 각 픽셀에 대해 획득된 깊이 정보이고, 는 제1 프레임 영상의 수직축과 좌표(u.v)가 이루는 각도를 의미하며, height는 제1 프레임 영상의 수직축 픽셀 수를 의미하고, width는 제1 프레임 영상의 수평축 픽셀 수를 의미함. |
| 6 | 제1항에 있어서,상기 광학 플로우 영상 생성부는 상기 변환 영상 및 상기 제2 프레임 영상의 차영상을 이용하여 광학 플로우 영상을 생성하는 것을 특징으로 하는 동적 객체 검출 장치. |
| 7 | 삭제 |
| 8 | 제1항에 있어서,상기 생성된 광학 플로우 영상에 대해 침식 필터 및 확장 필터를 적용하여 후처리를 수행하는 후처리부를 더 포함하는 것을 특징으로 하는 동적 객체 검출 장치. |
| 9 | 삭제 |
| 10 | 삭제 |
| 11 | 제1 프레임 영상 및 제2 프레임 영상의 스테레오 영상을 획득하는 단계(a);제1 프레임 및 제2 프레임 구간에서의 카메라 움직임을 검출하는 단계(b);상기 제1 프레임 영상의 스테레오 영상을 이용하여 상기 제1 프레임 영상의 픽셀별 깊이를 획득하는 단계(c);상기 카메라 움직임 및 상기 픽셀별 깊이에 기초하여 상기 제1 프레임 영상을 변환한 변환 영상을 생성하는 단계(d);상기 제2 프레임 영상 및 상기 변환 영상을 이용하여 광학 플로우 영상을 생성하는 단계(e); 및상기 생성된 광학 플로우 영상을 이용하여 동적 객체를 검출하는 단계(f)를 포함하되,상기 단계(b)는 상기 카메라의 회전 움직임 및 직선 움직임을 독립적으로 검출하며,상기 변환 영상은 상기 카메라 움직임을 상기 제1 프레임 영상에 반영하여 변환한 영상이고,상기 단계(d)는 상기 회전 움직임 및 상기 직선 움직임을 독립적으로 적용하여 변환 영상을 생성하며,상기 단계(d)는 상기 회전 움직임에 기초하여 상기 제1 프레임 영상을 다음의 수학식과 같이 변환하는 것을 특징으로 하는 동적 객체 검출 방법. 위 수학식에서, ru는 제1 프레임 영상 픽셀 좌표 u에 대한 회전 움직임을 의미하고, rv는 제1 프레임 영상 픽셀 좌표 v에 대한 회전 움직임을 의미하며, yaw, pitch, roll은 검출된 회전 움직임 성분을 의미하고, 는 제1 프레임 영상의 수직축과 좌표(u.v)가 이루는 각도를 의미하고, FoV는 시야각을 의미하며, d는 각 픽셀에 대해 획득된 깊이 정보를 의미하고, s는 소실점에서 (u.v)까지의 거리를 의미하며, height는 제1 프레임 영상의 수직축 픽셀 수를 의미하고, width는 제1 프레임 영상의 수평축 픽셀 수를 의미함. |
| 12 | 삭제 |
| 13 | 삭제 |
| 14 | 삭제 |
| 15 | 제11항에 있어서,상기 단계(d)는 상기 직선 움직임에 기초하여 상기 제1 프레임 영상을 다음의 수학식과 같이 변환하는 것을 특징으로 하는 동적 객체 검출 방법. 위 수학식에서, tu 및 tv는 제1 프레임 영상 좌표 (u,v)의 u축 및 v축으로의 변환을 의미하고, d는 각 픽셀에 대해 획득된 깊이 정보이고, 는 제1 프레임 영상의 수직축과 좌표(u.v)가 이루는 각도를 의미하며, height는 제1 프레임 영상의 수직축 픽셀 수를 의미하고, width는 제1 프레임 영상의 수평축 픽셀 수를 의미함. |
| 16 | 제11항에 있어서,상기 단계(e)는 상기 변환 영상 및 상기 제2 프레임 영상의 차영상을 이용하여 광학 플로우 영상을 생성하는 것을 특징으로 하는 동적 객체 검출 방법. |
| 17 | 삭제 |
| 18 | 제11항에 있어서,상기 생성된 광학 플로우 영상에 대해 침식 필터 및 확장 필터를 적용하여 후처리를 수행하는 단계를 더 포함하는 것을 특징으로 하는 동적 객체 검출 방법. |