| 번호 | 청구항 |
|---|---|
| 9 | 제6항에 있어서, 상기 NeRF 연산단계는,4비트(X0, X1, X2, X3)의 입력신호들 중 X0와 X1가 모두 1인 경우를 AND 게이트로 검출하여, X0와 X1가 동시에 1일 때만 오류가 발생하는 근사압축기의 오류를 인식하고, 상기 3D 경로 계획 가속기에 구비된 오류보상형 감산트리(ECRT)의 근사화 수준을 미리 설정된 3단계 중 하나로 조절하는 오류보상단계를 더 포함하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속방법. |
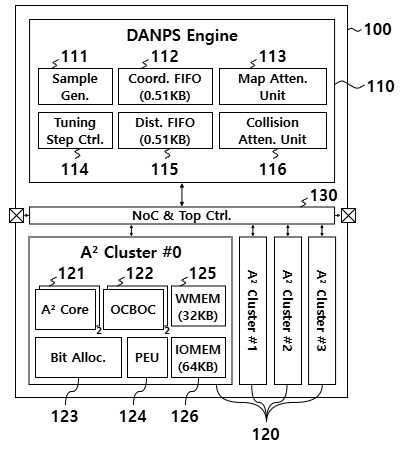
| 1 | NeRF를 이용한 3D 경로 계획 가속기에 있어서,지도주의(Map Attention) 메커니즘을 이용한 적응형샘플링에 의해 시작점과 종료점 사이의 경로샘플을 생성하고, 충돌주의(Collision Attention) 메커니즘을 이용한 필터링에 의해 이동체의 물리적 구조를 고려한 바디샘플을 생성하는 이중주의기반신경경로샘플링(DANPS) 엔진; 및상기 경로샘플 및 상기 바디샘플들 각각에 대하여, 근사 정확 병행 연산에 의한 NeRF MLP 연산을 수행하여 3D 경로 계획을 가속하는 다수의 연산 클러스터들을 포함하되,상기 연산 클러스터들 각각은,상기 경로샘플에 대한 NeRF MLP 추론결과인 밀도값과 미리 설정된 임계값을 비교하여 점유(occupancy)를 판별하여 경로샘플을 결정하고, 상기 바디샘플에 대한 NeRF MLP 연산과정에서 생성되는 중간특성맵(iFmap)의 부호에 의해 튜닝벡터를 생성한 후, 상기 튜닝벡터를 이용하여 상기 경로샘플을 조정하여 튜닝된 경로를 생성하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속기. |
| 2 | 제1항에 있어서, 상기 DANPS 엔진은,거친(coarse) 샘플링 격자를 사용하여 3D 경로 계획을 위한 시작점과 종료점 사이에 다수의 서브경로(sub-path)들을 생성하고, 상기 거친 샘플링 격자 단위로 충돌 또는 빈공간 여부를 예측한 후 그 결과에 의해 상기 거친 샘플링 격자 단위로 적응형샘플링을 수행하여, 충돌이 예측되는 거친 샘플링 격자와 빈공간이 예측되는 거친 샘플링 격자의 경로샘플 수를 다르게 생성하는 지도주의유닛(MAU); 및소벨필터링을 수행하여 상기 이동체의 모서리에 해당하는 바디샘플만을 선택하여 상기 연산 클러스터로 전달하는 충돌주의유닛(CAU)을 포함하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속기. |
| 3 | 제1항에 있어서, 상기 연산 클러스터는,상기 NeRF MLP 연산을 수행하는 연산코어를 포함하되, 상기 연산코어는,각각 64개의 오류 보상형 감산트리(Error Compensation Reduction Tree, ECRT)로 구성된 4개의 오류보상형감산트리(ECRT) 연산요소(Processing Element, PE) 배열들을 포함하고,상기 ECRT 각각은,4비트(X0, X1, X2, X3)의 입력신호들 중 X0와 X1가 동시에 1일 때만 오류가 발생하는 근사압축기를 이용하여 설계된 2개의 16감산트리(16 Reduction Tree, 16RT)를 포함하는 4개의 32팬인 감산트리(32 Fan-in RT); 및X0와 X1가 모두 1인 경우를 AND 게이트로 검출해 상기 근사압축기 오류를 인식하고, 상기 ECRT의 근사화 수준을 3단계로 조절하는 8개의 모드 인식 게이팅 보상로직(Mode-aware Gating Compensation Logic, MGCL)을 포함하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속기. |
| 4 | 제3항에 있어서, 상기 연산코어는,상기 MGCL의 보상 오버헤드를 줄이기 위한 비트 희소성 부스팅 코어(Bit Sparsity Boosting Core, BSBC)를 더 포함하되,상기 BSBC는,희소한 가중치(sparse weight)를 상기 근사압축기의 X0 위치에 배치하도록 입력채널 가중치를 재배치하는 인터-PE 최적화모듈(inter-PE optimization); 및가중치(weight)와 입력(input)의 비트 희소성을 비교하여, 그 희소성이 더 높은 데이터를, 상기 근사압축기의 X0의 희소성을 결정하는, 공간데이터(Spatial Data)로 선택하는 인트라-PE 최적화모듈(intra-PE optimization)을 포함하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속기. |
| 5 | 제3항에 있어서, 상기 연산 클러스터는,비트 직렬 연산을 위해 입력되는 입력 채널 데이터들 중 아웃라이어 채널의 최상위비트(Most Significant Bit, MSB)를 오프로딩하여, 상기 아웃라이어 채널의 최하위비트(Least Significant Bit, LSB)와 병렬 처리하는 아웃라이어 채널 오프로딩코어(Outlier Channel Bit Offloading Core, OCBOC); 및상기 비트 직렬 연산을 위해 입력되는 입력 채널 데이터들의 최상위비트(MSB) 값에 의거하여 상기 입력 채널들 각각의 아웃라이어 채널 여부를 판별하고, 아웃라이어 채널의 최상위비트(MSB)를 상기 OCBOC로 오프로딩하고, 상기 아웃라이어 채널의 최하위비트(LSB)는 상기 연산코어로 전달하는 비트할당기(Bit Allocation, BA)를 더 포함하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속기. |
| 6 | NeRF를 기반으로 한 3D 경로 계획 가속기를 이용한 3D 경로 계획 가속방법에 있어서, 상기 3D 경로 계획 가속기가, 지도주의(Map Attention) 메커니즘을 이용한 적응형샘플링에 의해 시작점과 종료점 사이의 경로샘플을 생성하는 경로샘플생성단계;상기 3D 경로 계획 가속기가, 충돌주의(Collision Attention) 메커니즘을 이용한 필터링에 의해 이동체의 물리적 구조를 고려한 바디샘플을 생성하는 바디샘플생성단계; 및상기 3D 경로 계획 가속기가, 상기 경로샘플 및 상기 바디샘플들 각각에 대하여, 근사 정확 병행 연산에 의한 NeRF MLP 연산을 수행하여 3D 경로 계획을 가속하는 NeRF 연산단계를 포함하되,상기 NeRF 연산단계는,상기 3D 경로 계획 가속기가, 상기 경로샘플에 대한 NeRF MLP 연산 중 NeRF MLP 추론 결과인 밀도값과 미리 설정된 임계값을 비교하여 점유(occupancy)를 판별하여 경로샘플을 결정하는 경로샘플근사화단계;상기 바디샘플에 대한 NeRF MLP 연산과정에서 생성되는 중간특성맵(iFmap)의 부호에 의해 근사화된 튜닝벡터를 생성하는 튜닝벡터생성단계; 및상기 튜닝벡터를 이용하여 상기 경로샘플을 조정하여 튜닝된 경로를 생성하는 경로생성단계를 포함하는 것을 특징으로 하는 3D 경로 계획 가속방법. |
| 7 | 제6항에 있어서, 상기 경로샘플생성단계는,거친(coarse) 샘플링 격자를 사용하여 3D 경로 계획을 위한 시작점과 종료점 사이에 다수의 서브경로(sub-path)들을 생성하는 서브경로생성단계;상기 서브경로들 각각에 대하여 상기 거친 샘플링 격자 단위로 충돌 또는 빈공간 여부를 예측하는 예측단계; 및상기 예측 결과에 의해 상기 거친 샘플링 격자 단위로 적응형샘플링을 수행하여, 충돌이 예측되는 거친 샘플링 격자와 빈공간이 예측되는 거친 샘플링 격자의 경로샘플 수를 다르게 생성하는 적응형샘플링단계를 포함하는 것을 특징으로 하는 3D 경로 계획 가속방법. |
| 8 | 제6항에 있어서, 상기 바디샘플생성단계는,소벨필터링을 수행하여 상기 이동체의 모서리에 해당하는 바디샘플만을, 상기 튜닝벡터를 생성하기 위한 바디샘플로 선택하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속방법. |
| 10 | 제9항에 있어서, 상기 NeRF 연산단계는,상기 오류보상단계의 보상 오버헤드를 줄이기 위한 비트 희소성 부스팅단계를 더 포함하되,상기 비트 희소성 부스팅단계는, 희소한 가중치(sparse weight)를 상기 근사압축기의 X0 위치에 배치하도록 입력채널 가중치를 재배치하는 입력 채널 재배치 단계; 및가중치(weight)와 입력(input)의 비트 희소성을 비교하여, 그 희소성이 더 높은 데이터를, 상기 근사압축기의 X0의 희소성을 결정하는, 공간데이터(Spatial Data)로 선택하는 공간데이터선택단계를 포함하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속방법. |
| 11 | 제6항에 있어서, 상기 NeRF 연산단계는,비트 직렬 연산을 위해 입력되는 입력 채널 데이터들의 최상위비트(Most Significant Bit, MSB) 값에 의거하여 상기 입력 채널들 각각의 아웃라이어 채널 여부를 판별하는 아웃라이어 채널판별단계;상기 비트 직렬 연산을 위해 입력되는 입력 채널 데이터들 중 아웃라이어 채널의 최상위비트(MSB)를 오프로딩하는 오프로딩단계; 및상기 오프로딩된 아웃라이어 채널의 최상위비트(MSB)와 상기 아웃라이어 채널의 최하위비트(Least Significant Bit, LSB)를 병렬 처리하는 병렬처리단계를 더 포함하는 것을 특징으로 하는 NeRF를 이용한 3D 경로 계획 가속방법. |