| 번호 | 청구항 |
|---|---|
| 10 | 제6항에서RF 프런트 엔드를 통해 상기 제1안테나와 상기 제2안테나에서 수신한 RF 신호를 처리하는 단계, 그리고아날로그-디지털 변환기를 통해 상기 RF 프런트 엔드에서 출력된 아날로그 신호를 디지털 변환하여 상기 제1신호 및 상기 제2신호를 출력하는 단계를 더 포함하는, 방법. |
| 1 | 제1 축에 정렬되고, 상기 제1축과 다른 제2 축에서 서로 다른 방향으로 지향성을 가지도록 설정된 한 쌍의 제1 안테나와 제2 안테나, 그리고상기 제1 안테나와 상기 제2 안테나를 통해 수신된 제1 신호와 제2 신호 사이의 위상 차이 및 진폭 차이를 이용하여 3차원 공간에서의 신호 도달 방향을 추정하도록 구현된 프로세서를 포함하는, 장치. |
| 2 | 제1항에서상기 프로세서는상기 제1 신호와 상기 제2 신호 사이의 위상 차이 및 진폭 차이를 측정하고,상기 위상 차이로부터 수신 신호가 상기 제1 축 방향으로 들어오는 제1 각도를 추정하고,상기 진폭 차이로부터 상기 수신 신호가 상기 제2 축 방향으로 들어오는 제2 각도를 추정하며, 상기 제1 각도와 상기 제2 각도를 이용하여 상기 3차원 공간에서 상기 수신 신호의 도달 방향을 추정하도록 구현되는, 장치. |
| 3 | 제2항에서상기 프로세서는상기 위상 차이, 상기 수신 신호의 파장, 그리고 상기 제1 안테나와 상기 제2 안테나의 간격을 이용하여, 상기 제1 각도를 추정하도록 구현되는, 장치. |
| 4 | 제2항에서상기 프로세서는상기 제1 안테나의 빔 패턴과 상기 제2 안테나의 빔 패턴을 측정하여 빔 패턴 차이를 계산하고, 상기 진폭 차이와 상기 빔 패턴 차이를 이용하여 상기 제2 각도를 추정하도록 구현되는, 장치. |
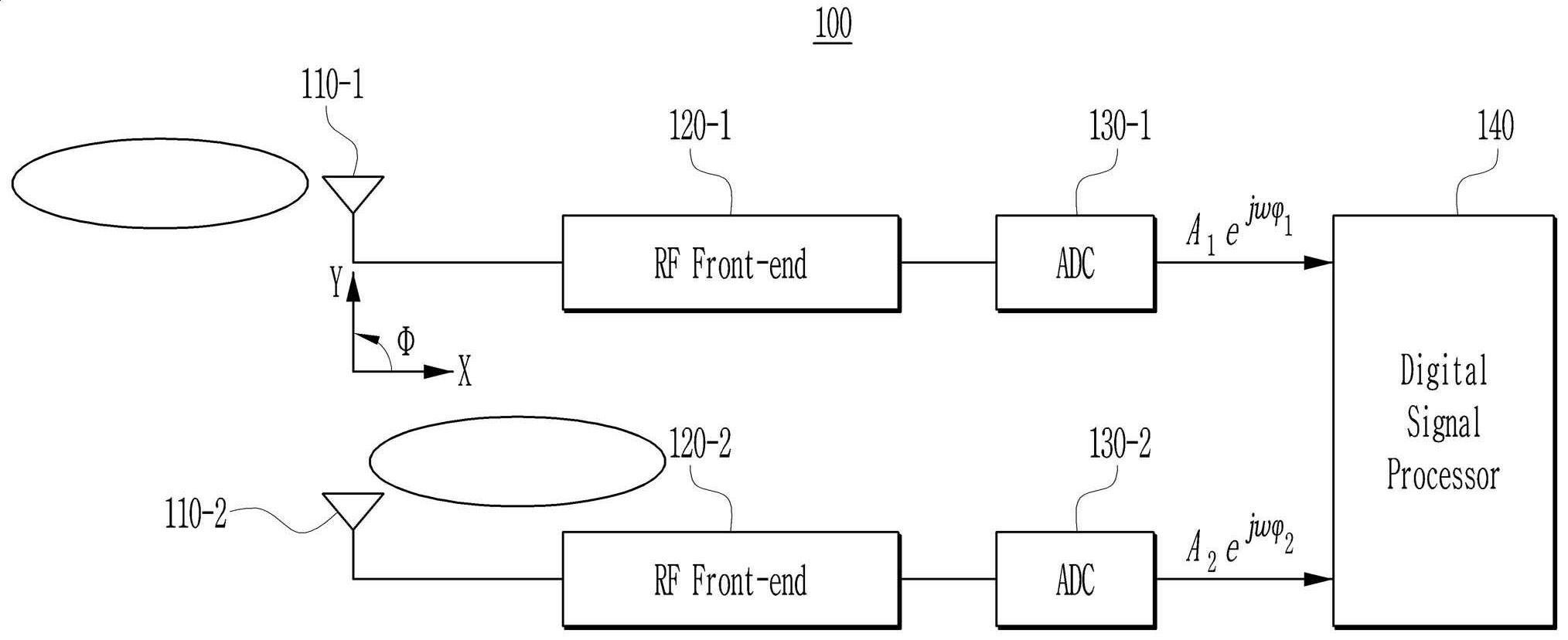
| 5 | 제1항에서상기 제1 안테나와 상기 제2 안테나에서 수신한 RF 신호를 처리하는 RF 프런트 엔드, 그리고상기 RF 프런트 엔드에서 출력된 아날로그 신호를 디지털 변환하여 상기 제1 신호 및 상기 제2 신호를 출력하는 아날로그-디지털 변환기를 더 포함하는, 장치. |
| 6 | 장치가 신호 도달 방향을 추정하는 방법으로서,한 쌍의 제1 안테나와 제2 안테나를 통해 제1 신호와 제2 신호를 수신하는 단계, 그리고상기 제1 신호와 상기 제2 신호 사이의 위상 차이 및 진폭 차이를 이용하여 3차원 공간에서의 신호 도달 방향을 추정하는 단계를 포함하고, 상기 한 쌍의 제1 안테나와 제2 안테나는 제1 축에 정렬되고, 상기 제1 축과 다른 제2 축에서 서로 다른 방향으로 지향성을 가지도록 설정되는, 방법. |
| 7 | 제6항에서상기 신호 도달 방향을 추정하는 단계는상기 제1 신호와 상기 제2 신호 사이의 위상 차이 및 진폭 차이를 측정하는 단계,상기 위상 차이로부터 수신 신호가 상기 제1 축 방향으로 들어오는 제1 각도를 추정하는 단계,상기 진폭 차이로부터 상기 수신 신호가 상기 제2축 방향으로 들어오는 제2 각도를 추정하는 단계, 그리고상기 제1 각도와 상기 제2 각도를 이용하여 상기 3차원 공간에서 상기 수신 신호의 도달 방향을 추정하는 단계를 포함하는, 방법. |
| 8 | 제7항에서상기 제1 각도를 추정하는 단계는상기 위상 차이, 상기 수신 신호의 파장, 그리고 상기 제1 안테나와 상기 제2 안테나의 간격을 이용하여, 상기 제1 각도를 추정하는, 방법. |
| 9 | 제7항에서상기 제2 각도를 추정하는 단계는상기 제1 안테나의 빔 패턴과 상기 제2 안테나의 빔 패턴을 측정하여 빔 패턴 차이를 계산하고, 상기 진폭 차이와 상기 빔 패턴 차이를 이용하여 상기 제2 각도를 추정하는, 방법. |