| 번호 | 청구항 |
|---|---|
| 8 | 제7항에 있어서,상기 손 자세를 감지하는 단계는사용자가 물체를 향해 손을 뻗으면, 손과 팔 움직임의 순서를 분석하여 잡기 원하는 손 자세를 감지하는, 손 자세 재활 시스템의 동작 방법. |
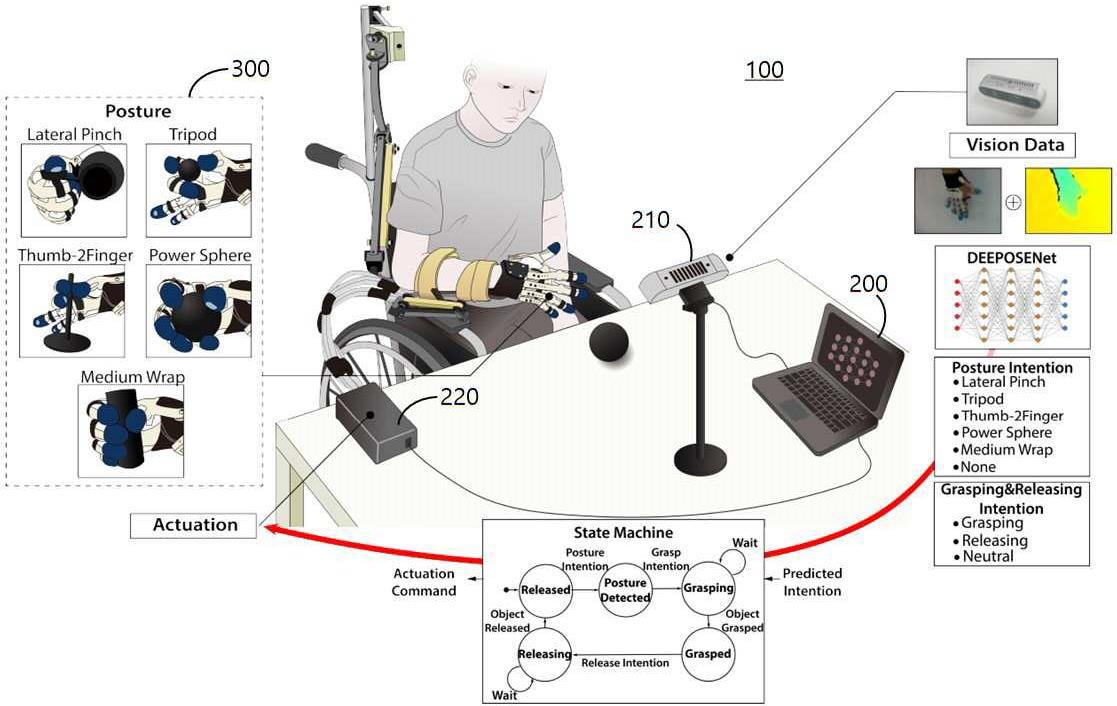
| 1 | 비전 기반 의도 감지 및 소프트 로봇 글러브를 이용한 다중 손 자세 재활 시스템에 있어서,사용자의 팔 행동과 손 물체 상호 작용을 관찰하는 이미지와 깊이 데이터를 분석하여 여러 손 자세에 대한 의도를 분석하고, 이를 명령으로 전송하는 의도 감지 프레임워크; 및개별 손가락의 굴곡과 확장을 용이하게 하여 사용자가 원하는 손 자세를 수행하도록 하는 소프트 로봇 글러브를 포함하는 손 자세 재활 시스템. |
| 2 | 제1항에 있어서,상기 의도 감지 프레임워크는사용자의 일정 거리 앞에 위치한 감지 모듈을 통해 사용자의 팔 행동과 손 물체 상호 작용을 관찰하는 상기 이미지 및 상기 깊이 데이터를 수신하는 데이터 수신부;상기 이미지 및 상기 깊이 데이터를 이용하여 사용자의 팔 행동과 손 물체 상호 작용에 따른 손과 팔의 움직임의 순서를 분석하여 손 자세를 감지하는 자세 분석부; 및원하는 손 자세와 물체를 잡기 위한 의도에 따라 작동 모듈로 명령을 전송하여 소프트 로봇 글러브의 움직임을 제어하는 글러브 제어부를 포함하는 손 자세 재활 시스템. |
| 3 | 제2항에 있어서,상기 데이터 수신부는사용자와 일정 거리에 이격되어 위치하는 상기 감지 모듈을 통해 기록된 이미지, RGB 데이터 및 깊이 데이터를 수신하는, 손 자세 재활 시스템. |
| 4 | 제2항에 있어서,상기 자세 분석부는사용자가 물체를 향해 손을 뻗으면, 손과 팔 움직임의 순서를 분석하여 잡기 원하는 손 자세를 감지하는, 손 자세 재활 시스템. |
| 5 | 제4항에 있어서,상기 글러브 제어부는원하는 손 자세와 물체를 잡기 위한 의도에 따라 상기 작동 모듈에 명령을 전송하며, 상기 소프트 로봇 글러브와 연결된 작동 모듈의 와이어에 장력을 가하여 상기 소프트 로봇 글러브가 손가락 움직임을 용이하게 하여 사용자가 의도한 잡는 움직임을 생성하도록 하는, 손 자세 재활 시스템. |
| 6 | 제5항에 있어서,상기 글러브 제어부는상기 소프트 로봇 글러브가 사용자가 의도한 잡는 물체의 변위를 완료하면, 상기 자세 분석부는이미지 및 깊이 데이터를 이용하여 물체를 놓으려는 사용자의 의도를 감지하며, 상기 글러브 제어부는상기 작동 모듈에 명령하여 장력을 해제하여 상기 소프트 로봇 글러브가 손에 힘을 가하지 않도록 제어하는, 손 자세 재활 시스템. |
| 7 | 의도 감지 및 소프트 로봇 글러브를 이용한 다중 손 자세 재활 시스템의 동작 방법에 있어서,사용자의 일정 거리 앞에 위치한 감지 모듈을 통해 사용자의 팔 행동과 손 물체 상호 작용을 관찰하는 이미지 및 깊이 데이터를 수신하는 단계;상기 이미지 및 깊이 데이터를 이용하여 사용자의 팔 행동과 손 물체 상호 작용에 따른 손과 팔의 움직임의 순서를 분석하여 손 자세를 감지하는 단계; 및원하는 손 자세와 물체를 잡기 위한 의도에 따라 작동 모듈로 명령을 전송하여 소프트 로봇 글러브의 움직임을 제어하는 단계를 포함하는 손 자세 재활 시스템의 동작 방법. |
| 9 | 제8항에 있어서,상기 소프트 로봇 글러브의 움직임을 제어하는 단계는원하는 손 자세와 물체를 잡기 위한 의도에 따라 상기 작동 모듈에 명령을 전송하며, 상기 소프트 로봇 글러브와 연결된 작동 모듈의 와이어에 장력을 가하여 상기 소프트 로봇 글러브가 손가락 움직임을 용이하게 하여 사용자가 의도한 잡는 움직임을 생성하도록 하는, 손 자세 재활 시스템의 동작 방법. |
| 10 | 제9항에 있어서,상기 소프트 로봇 글러브의 움직임을 제어하는 단계는상기 소프트 로봇 글러브가 사용자가 의도한 잡는 물체의 변위를 완료하면, 상기 손 자세를 감지하는 단계는이미지 및 깊이 데이터를 이용하여 물체를 놓으려는 사용자의 의도를 감지하며, 상기 소프트 로봇 글러브의 움직임을 제어하는 단계는상기 작동 모듈에 명령하여 장력을 해제하여 상기 소프트 로봇 글러브가 손에 힘을 가하지 않도록 제어하는, 손 자세 재활 시스템의 동작 방법. |