| 번호 | 청구항 |
|---|---|
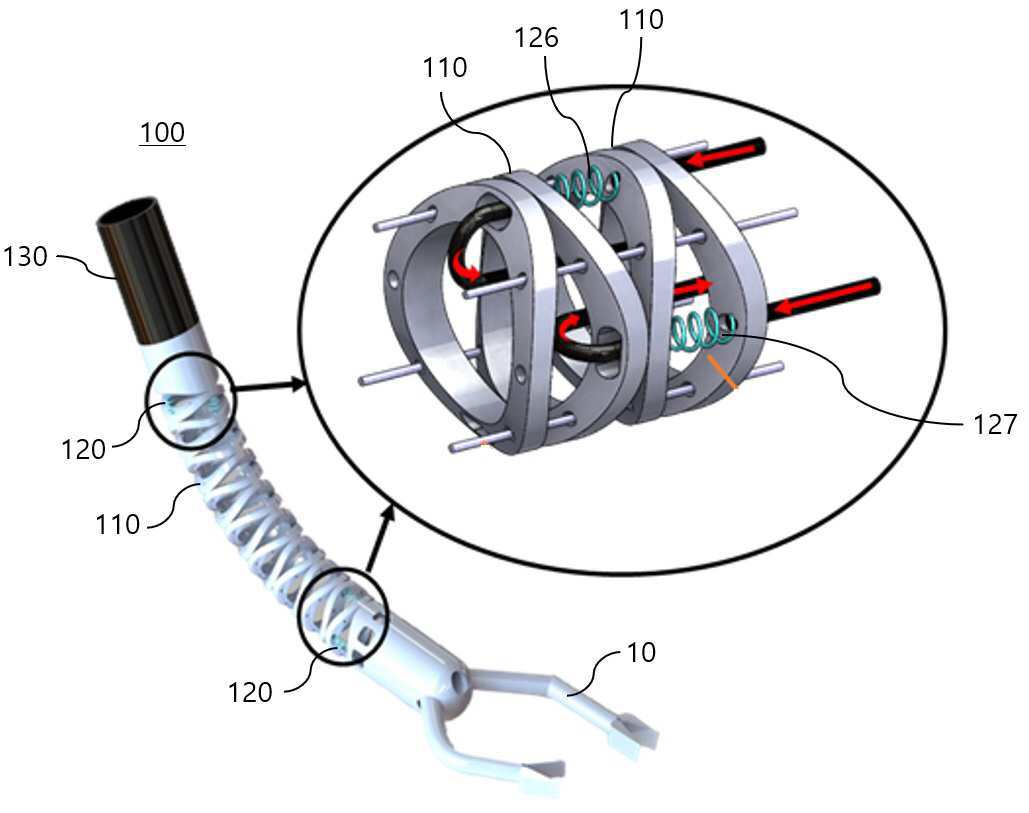
| 1 | 유연 로봇에 있어서, 복수의 관절들을 통해 일렬로 연결되는 복수의 연결 유닛들; 양단부들에 있는 두 개의 관절들에 각각 배치되는 센서들; 및상기 센서들을 통해 상기 두 개의 관절들에서의 관절 각도들을 각각 검출하고, 상기 검출된 관절 각도들을 이용하여 상기 연결 유닛들에 의해 형성되는 상기 유연 로봇의 형상을 추정하도록 구성되는 프로세서를 포함하는,유연 로봇. |
| 2 | 제 1 항에 있어서, 인접한 두 개의 연결 유닛들은 서로에 대해 요 회전 및 피치 회전이 가능하도록 연결되고, 상기 센서들의 각각은,상기 두 개의 관절들의 각각에서, 인접한 두 개의 연결 유닛들 사이의 요 및 피치를 각각 감지하도록 구성되는 요 센서부 및 피치 센서부를 포함하고,상기 프로세서는,상기 두 개의 관절들의 각각에서의 상기 요 및 피치를 기반으로, 상기 두 개의 관절들에서의 상기 관절 각도들을 검출하도록 구성되는,유연 로봇. |
| 3 | 제 1 항에 있어서, 상기 프로세서는,상기 유연 로봇의 굽힘 각도를 모니터링하고, 상기 검출된 관절 각도들과 함께 상기 굽힘 각도를 이용하여 상기 형상을 추정하도록 구성되는,유연 로봇. |
| 4 | 제 3 항에 있어서,상기 프로세서는, 상기 검출된 관절 각도들을 비교하여 상기 유연 로봇에 가해지는 외력이 있는 지의 여부를 판단하고, 상기 외력이 있으면, 상기 굽힘 각도에 대응하여 미리 저장된 상기 유연 로봇에서의 제로 모멘트 포인트(zero moment point; ZMP)를 확인하고, 상기 검출된 관절 각도들과 상기 제로 모멘트 포인트에서의 관절 각도로부터 상기 복수의 관절들에 대한 관절 각도들을 결정하여, 상기 형상을 추정하도록 구성되는,유연 로봇. |
| 5 | 제 4 항에 있어서,상기 프로세서는, 상기 외력이 없으면, 상기 복수의 관절들에 대한 관절 각도들이 상기 굽힘 각도를 상기 복수의 관절들의 개수로 나눈 값과 각각 동일한 것으로 결정하여, 상기 형상을 추정하도록 구성되는,유연 로봇. |
| 6 | 복수의 관절들을 통해 일렬로 연결되는 복수의 연결 유닛들을 포함하는 유연 로봇의 형상 추정 방법에 있어서,양단부들에 있는 두 개의 관절들에 각각 배치되는 센서들을 상기 두 개의 관절들에서의 관절 각도들을 각각 검출하는 단계; 및상기 검출된 관절 각도들을 이용하여 상기 연결 유닛들에 의해 형성되는 상기 유연 로봇의 형상을 추정하는 단계를 포함하는,형상 추정 방법. |
| 7 | 제 6 항에 있어서, 상기 연결 유닛들은 서로에 대해 요 회전 및 피치 회전이 가능하도록 연결되고, 상기 센서들의 각각은,상기 두 개의 관절들의 각각에서, 인접한 두 개의 연결 유닛들 사이의 요 및 피치를 각각 감지하도록 구성되는 요 센서부 및 피치 센서부를 포함하고,상기 관절 각도들을 각각 검출하는 단계는,상기 두 개의 관절들의 각각에서의 상기 요 및 피치를 기반으로, 상기 두 개의 관절들에서의 상기 관절 각도들을 검출하는,형상 추정 방법. |
| 8 | 제 6 항에 있어서, 상기 유연 로봇의 굽힘 각도를 모니터링하는 단계를 더 포함하고,상기 형상을 추정하는 단계는,상기 검출된 관절 각도들과 함께 상기 굽힘 각도를 이용하여 상기 형상을 추정하는,형상 추정 방법. |
| 9 | 제 8 항에 있어서,상기 형상을 추정하는 단계는,상기 검출된 관절 각도들을 비교하여 상기 유연 로봇에 가해지는 외력이 있는 지의 여부를 판단하는 단계;상기 외력이 있으면, 상기 굽힘 각도에 대응하여 미리 저장된 상기 유연 로봇에서의 제로 모멘트 포인트를 확인하는 단계; 및상기 검출된 관절 각도들과 상기 제로 모멘트 포인트에서의 관절 각도로부터 상기 복수의 관절들에 대한 관절 각도들을 결정하여, 상기 형상을 추정하는 단계를 포함하는,형상 추정 방법. |
| 10 | 제 9 항에 있어서,상기 형상을 추정하는 단계는,상기 외력이 없으면, 상기 복수의 관절들에 대한 관절 각도들이 상기 굽힘 각도를 상기 복수의 관절들의 개수로 나눈 값과 각각 동일한 것으로 결정하여, 상기 형상을 추정하는 단계를 더 포함하는,형상 추정 방법. |