| 번호 | 청구항 |
|---|---|
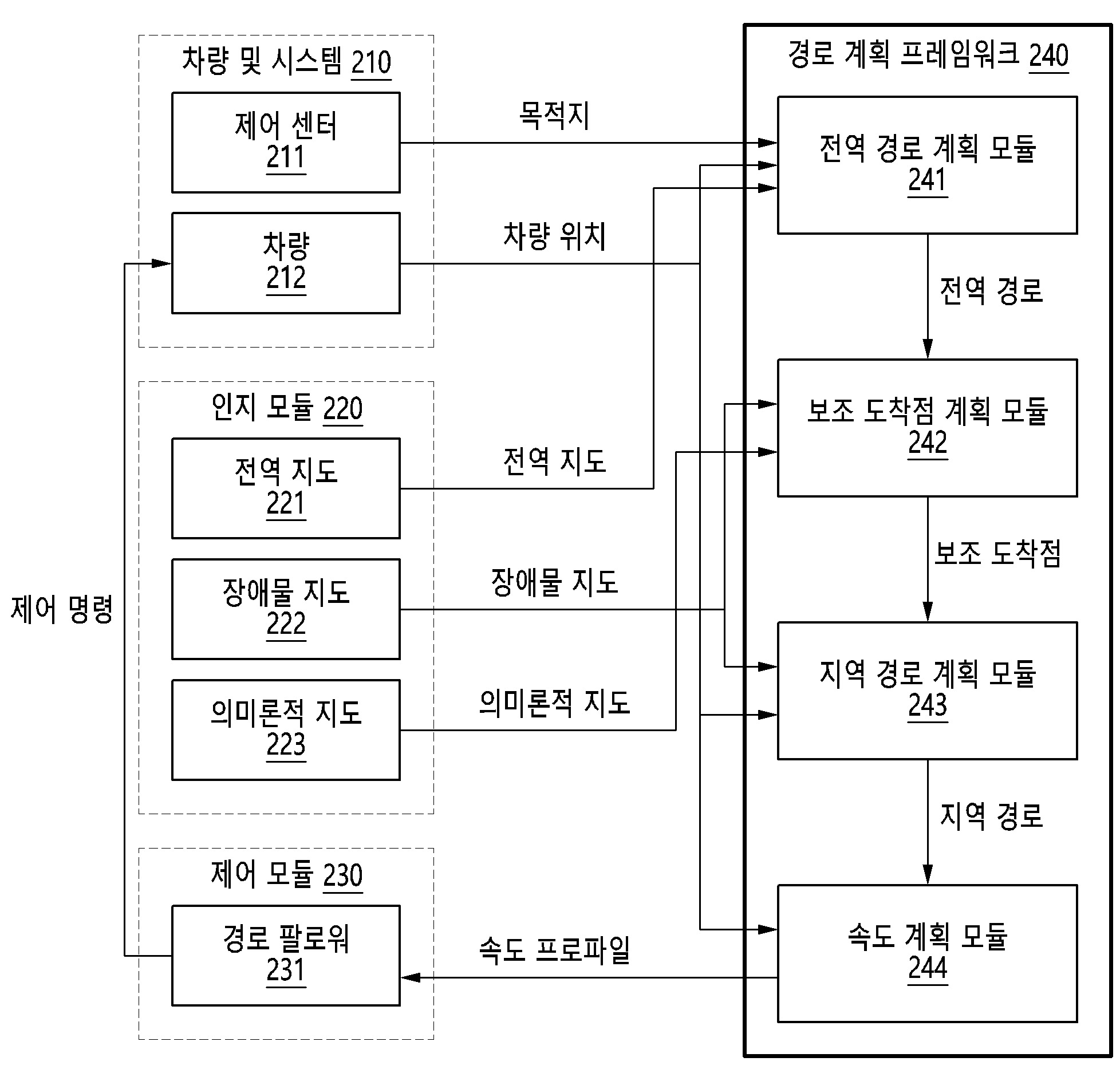
| 1 | 전자 장치의 동작 방법에 있어서,차량의 출발지부터 목적지까지를 포함하는 전역 지도(global map)에 기초하여, 상기 차량이 상기 출발지로부터 상기 목적지에 도달하기 위한 전역 경로(global path)를 생성하는 동작;상기 목적지에 도달하기 위한 보조 도착점(subgoal)에 대한 복수의 후보들을 설정하고, 상기 전역 경로 및 상기 차량의 현재 위치를 기준으로 하는 지역 지도(local map)에 기초하여, 상기 복수의 후보들 중 어느 하나를 상기 보조 도착점으로 선택하는 동작; 및상기 보조 도착점 및 상기 지역 지도에 기초하여, 상기 차량의 현재 위치로부터 상기 보조 도착점까지의 지역 경로(local path)를 생성하는 동작을 포함하고,상기 지역 지도는상기 차량의 주행 가능 여부를 나타내는 정보 및 상기 지역 지도 내에 포함된 객체의 타입 정보를 포함하는,전자 장치의 동작 방법. |
| 2 | 제1항에 있어서,상기 복수의 후보들 중 어느 하나를 보조 도착점으로 선택하는 동작은상기 전역 경로까지의 거리, 상기 차량의 주행 방향 또는 상기 객체에 따른 주행 가능성 중 하나 이상에 기초하여 상기 복수의 후보들 중 어느 하나를 선택하는,전자 장치의 동작 방법. |
| 3 | 제2항에 있어서,상기 복수의 후보들 중 어느 하나를 보조 도착점으로 선택하는 동작은상기 복수의 후보들 중에서, 상기 전역 경로까지의 거리, 상기 차량의 주행 방향 또는 상기 객체에 따른 주행 가능성 중 하나 이상에 기초하여 결정된 비용이 최소가 되는 어느 하나를 상기 보조 도착점으로 선택하는,전자 장치의 동작 방법. |
| 4 | 제2항에 있어서,상기 주행 가능성은상기 객체의 타입 정보에 따라 상기 차량의 주행이 용이한지 정도를 나타내는 정보를 나타내는,전자 장치의 동작 방법. |
| 5 | 제1항에 있어서,상기 객체의 타입 정보는상기 지역 지도 내에 포함되는 그라운드, 풀, 나무, 바위, 다른 차량 중 어느 하나를 나타내는,전자 장치의 동작 방법. |
| 6 | 제1항에 있어서,상기 차량의 주행 가능 여부를 나타내는 정보는상기 지역 지도 내에 포함된 장애물의 유무에 따라 상기 차량이 주행 가능한 영역인지를 나타내는,전자 장치의 동작 방법. |
| 7 | 제1항에 있어서,상기 생성된 지역 경로에 기초하여, 상기 차량이 상기 지역 경로를 따라 이동할 속도 프로파일을 생성하는 동작을 더 포함하는전자 장치의 동작 방법. |
| 8 | 제7항에 있어서,상기 속도 프로파일을 생성하는 동작은상기 지역 경로의 궤적, 곡률 또는 상기 차량의 최대 가속도 정보에 기초하여 속도 프로파일을 생성하는,전자 장치의 동작 방법. |
| 9 | 제7항에 있어서,상기 속도 프로파일은미리 정해진 최대 종방향 감가속도에 기초한 사다리꼴의(trapezoidal) 속도 프로파일인,전자 장치의 동작 방법. |
| 10 | 전자 장치에 있어서,차량의 출발지부터 목적지까지를 포함하는 전역 지도에 기초하여, 상기 차량이 상기 출발지로부터 상기 목적지에 도달하기 위한 전역 경로를 생성하고,상기 목적지에 도달하기 위한 보조 도착점에 대한 복수의 후보들을 설정하고, 상기 전역 경로 및 상기 차량의 현재 위치를 기준으로 하는 지역 지도에 기초하여, 상기 복수의 후보들 중 어느 하나를 상기 보조 도착점으로 선택하며,상기 보조 도착점 및 상기 지역 지도에 기초하여, 상기 차량의 현재 위치로부터 상기 보조 도착점까지의 지역 경로를 생성하는프로세서를 포함하고,상기 지역 지도는상기 차량의 주행 가능 여부를 나타내는 정보 및 상기 지역 지도 내에 포함된 객체의 타입 정보를 포함하는,전자 장치. |
| 11 | 제10항에 있어서,상기 프로세서는상기 전역 경로까지의 거리, 상기 차량의 주행 방향 또는 상기 객체에 따른 주행 가능성 중 하나 이상에 기초하여 상기 복수의 후보들 중 어느 하나를 선택하는,전자 장치. |
| 12 | 제11항에 있어서,상기 프로세서는상기 복수의 후보들 중에서, 상기 전역 경로까지의 거리, 상기 차량의 주행 방향 또는 상기 객체에 따른 주행 가능성 중 하나 이상에 기초하여 결정된 비용이 최소가 되는 어느 하나를 상기 보조 도착점으로 선택하는,전자 장치. |
| 13 | 제11항에 있어서,상기 주행 가능성은상기 객체의 타입 정보에 따라 상기 차량의 주행이 용이한지 정도를 나타내는 정보를 나타내는,전자 장치. |
| 14 | 제10항에 있어서,상기 객체의 타입 정보는상기 지역 지도 내에 포함되는 그라운드, 풀, 나무, 바위, 다른 차량 중 어느 하나를 나타내는,전자 장치. |
| 15 | 제10항에 있어서,상기 차량의 주행 가능 여부를 나타내는 정보는상기 지역 지도 내에 포함된 장애물의 유무에 따라 상기 차량이 주행 가능한 영역인지를 나타내는,전자 장치. |
| 16 | 제10항에 있어서,상기 프로세서는상기 생성된 지역 경로에 기초하여, 상기 차량이 상기 지역 경로를 따라 이동할 속도 프로파일을 생성하는,전자 장치. |
| 17 | 제16항에 있어서,상기 프로세서는상기 지역 경로의 궤적, 곡률 또는 상기 차량의 최대 가속도 정보에 기초하여 생성하는,전자 장치. |
| 18 | 제16항에 있어서,상기 속도 프로파일은미리 정해진 최대 종방향 감가속도에 기초한 사다리꼴의(trapezoidal) 속도 프로파일인,전자 장치. |