| 번호 | 청구항 |
|---|---|
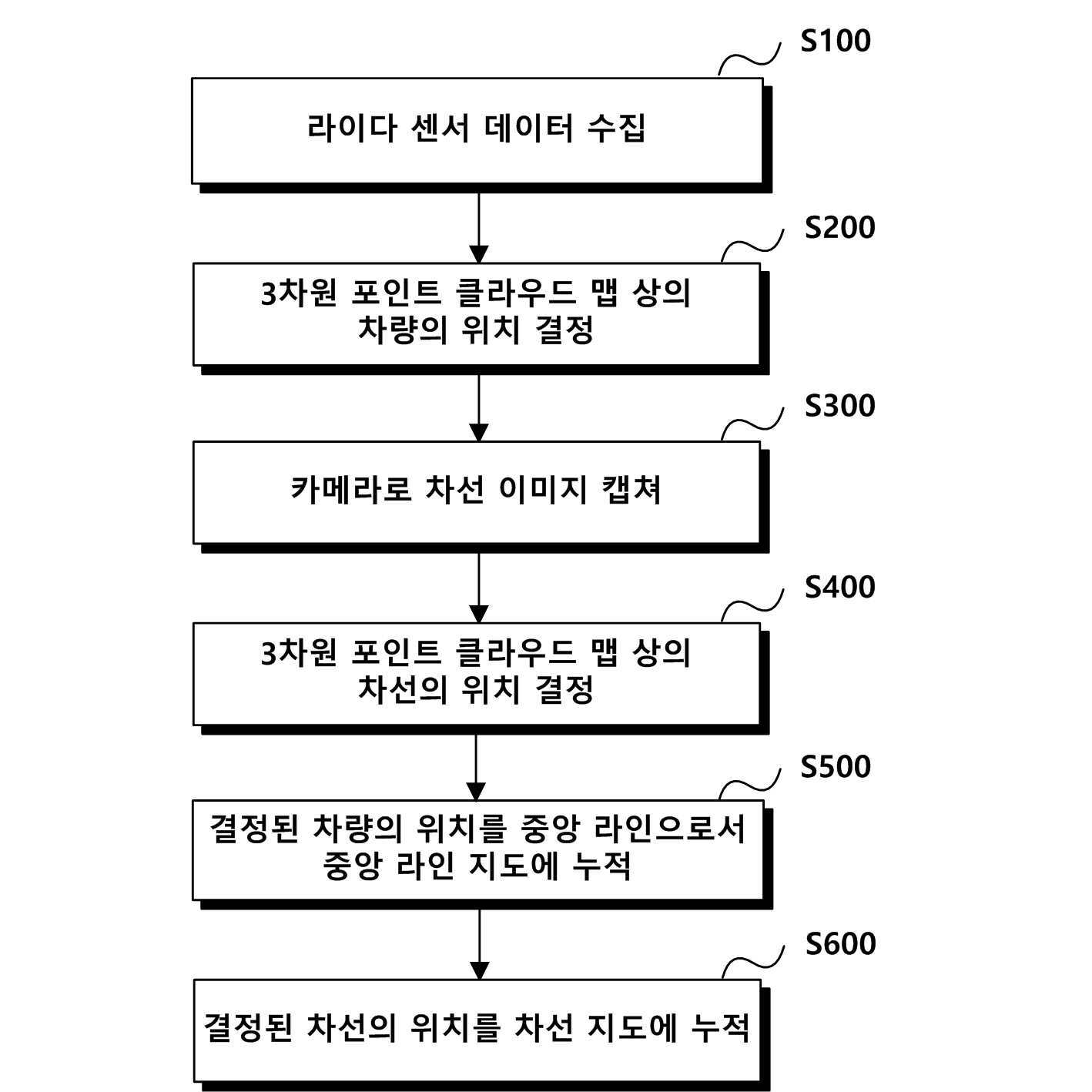
| 1 | 3차원 지도를 이용한 차선 레벨 지도 구축 방법으로서,(a) 주행중인 차량에 부착된 라이다(LiDAR) 센서에서 스캔(scan)하여 수집한 데이터를 이용하여, 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 상기 차량의 위치를 결정하는 단계;(b) 상기 차량에 설치된 카메라가 캡쳐한 이미지로부터 차선(lane)을 감지하는 단계;(c) 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 상기 차선의 위치를 결정하는 단계; 및,(d) 상기 단계(c)에서 결정된 상기 차선의 위치를, 차선을 나타내는 포인트로서 차선 레벨 지도에 누적시키는 단계를 포함하고,상기 단계(a)는,(a1) 라이다(LiDAR)에서 스캔하여 수집한 차량 주변 사물에 대한 다수의 포인트(이하 '입력 라이다 포인트'라 한다)를 상기 3차원 포인트 클라우드 맵 상의 포인트 그룹(이하 '타겟 포인트 그룹'이라 한다)과 매칭시켜 일치하는 경우를 찾는 단계;(a2) 일치하는 경우를 찾으면, 상기 차량의 위치를 상기 3차원 포인트 클라우드 맵 상의 좌표로 결정하는 단계를 포함하며,상기 타겟 포인트 그룹은,상기 3차원 포인트 클라우드 맵 상에서, 상기 차량으로부터 일정 거리 내에 존재하는 포인트들의 그룹(이하 '슬라이딩 윈도우'라 한다)이고,상기 단계(a1)에서, 인 경우 일치하는 것으로 판단하고,여기서 는 정합 점수(fitness score), 은 기 설정된 오차 기준값이며,로 산출되고,여기서, t는 특정시점, 는 상기 입력 라이다 포인트의 좌표로서, 차량을 원점으로 한 바디좌표계(body coordinates)로 표시된 좌표, 는 상기 슬라이딩 윈도우 내 포인트의 좌표로서, 상기 3차원 포인트 클라우드 맵 상의 특정점을 원점으로 하는 제1 월드좌표계(world coordinates)로 표시된 좌표이며,는 제1 월드좌표계의 원점에서 상기 차량의 현재 위치까지의 회전 행렬, 는 제1 월드좌표계의 원점에서 상기 차량의 현재 위치까지의 평행이동 행렬이고,는 상기 입력 라이다 포인트 값을 제1 월드좌표계(world coordinates)로 변환한 포인트 좌표이며,상기 단계(a1)에서 일치하는 것으로 판단되었으면, 상기 단계(a2)에서 상기 차량의 위치를, 그 시점의 상기 및 상기 로 업데이트 하는,3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 청구항 1에 있어서,상기 단계(a2) 이전에,(a11) 상기 입력 라이다 포인트로부터, 상기 차량의 주행시작점을 원점으로 한 좌표계(이하 '제2 월드좌표계) 상의 차량의 위치 좌표(이하 '라이다 오도메트리'라 한다)를 구하는 단계;(a12) 를 산출하는 단계를 더 포함하고,(a3) 상기 단계(a1)에서 일치하지 않는 것으로 판단되었으면, 상기 를 로 변환한 후 상기 를 이용하여 및 를 예측하고, 이를 그 시점의 및 로 업데이트 하는 단계를 더 포함하며,여기서 는 t+△t 시점의 라이다 오도메트리, 는 t 시점의 라이다 오도메트리이고,는 라이다 오도메트리로 예측된, 상기 차량의 위치 변화량을 바디좌표계로 나타낸 것, 는 상기 를 상기 제2 월드좌표계로 변환한 것이며,상기 은 제2 월드좌표계의 좌표를 바디좌표계의 좌표로 변환하는 행렬인 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 6 | 청구항 1에 있어서,상기 단계(b)에서 감지된 차선은,캡쳐된 이미지에서, 픽셀좌표계(pixel coordinates) 상의 좌표인 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 7 | 청구항 6에 있어서,상기 단계(c)는,(c1) 상기 차선의 좌표를, 차량을 원점으로 한 바디좌표계(body coordinates) 상의 좌표로 변환하는 단계; 및,(c2) 상기 바디좌표계 상의 차선의 좌표를 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 좌표로 변환하는 단계를 포함하는 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 8 | 청구항 7에 있어서,상기 단계(c1)에서,바디좌표계 상에서의 좌표로의 변환은,에 의해 이루어지고, 여기서은, 픽셀좌표계로 표시된 차선의 좌표,은, 바디좌표계로 표시된 차선의 좌표이고,행렬 H-1은 IPM(inverse perspective mapping)로서, 이때 행렬 H은를 만족하는 행렬이며, 여기서은 회전변환 행렬, 은 평행이동 행렬이고,K는 카메라의 내부 파라미터와 관련된 고유 행렬(intrinsic matrix)인 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 9 | 청구항 7에 있어서,상기 단계(c1)과 단계(c2) 사이에,(c11) 상기 단계(c1)에서 바디좌표계로 표현된 상기 차선의 점들에 대하여, 곡선 맞춤(curve fitting)을 수행하는 단계를 더 포함하는 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 10 | 청구항 7에 있어서,상기 단계(c2)에서 3차원 포인트 클라우드 맵(3D point cloud map) 상의 좌표로의 변환은,상기 단계(a)에서 결정된 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 상기 차량의 위치 정보를 이용하여 이루어지는 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 11 | 청구항 1에 있어서,(e) 상기 단계(d)에서 지도에 누적 생성된 차선의 각 포인트에 해당하는 속성 정보를 연동시키는 단계를 더 포함하는 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 12 | 청구항 1에 있어서,(d1) 상기 단계(a)에서 결정된 상기 차량의 위치를, 중앙 라인(center line)을 나타내는 포인트로 차선 레벨(lane-level) 지도에 누적시키는 단계를 더 포함하는 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 13 | 청구항 12에 있어서,(e1) 상기 단계(d1)에서 지도에 누적 생성된 중앙 라인의 각 포인트에 해당하는 속성 정보를 연동시키는 단계를 더 포함하는 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 14 | 청구항 11 또는 청구항 13에 있어서,상기 속성 정보의 연동은,위도-경도 좌표계로 구성된 주소와 속성 정보가 매핑되어 저장된 데이터베이스와 연동시키기 위하여, 구축된 차선 레벨 지도 상의 각 지점을 나타내는 좌표를 위도-경도 좌표계로 통일시키는 방식으로 수행되는 것를 포함하는 것을 특징으로 하는 3차원 지도를 이용한 차선 레벨 지도 구축 방법. |
| 15 | 3차원 지도를 이용한 차선 레벨 지도를 구축하기 위한, 컴퓨터로 판독 가능한 비일시적 저장 매체에 저장된 컴퓨터 프로그램으로서,비일시적 저장 매체에 저장되며, 프로세서에 의하여,(a) 주행중인 차량에 부착된 라이다(LiDAR) 센서에서 스캔(scan)하여 수집한 데이터를 이용하여, 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 상기 차량의 위치를 결정하는 단계;(b) 상기 차량에 설치된 카메라가 캡쳐한 이미지로부터 차선(lane)을 감지하는 단계;(c) 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 상기 차선의 위치를 결정하는 단계; 및,(d) 상기 단계(c)에서 결정된 상기 차선의 위치를, 차선을 나타내는 포인트로서 차선 레벨 지도에 누적시키는 단계가 실행되도록 하는 명령을 포함하고,상기 단계(a)는,(a1) 라이다(LiDAR)에서 스캔하여 수집한 차량 주변 사물에 대한 다수의 포인트(이하 '입력 라이다 포인트'라 한다)를 상기 3차원 포인트 클라우드 맵 상의 포인트 그룹(이하 '타겟 포인트 그룹'이라 한다)과 매칭시켜 일치하는 경우를 찾는 단계;(a2) 일치하는 경우를 찾으면, 상기 차량의 위치를 상기 3차원 포인트 클라우드 맵 상의 좌표로 결정하는 단계를 포함하며,상기 타겟 포인트 그룹은,상기 3차원 포인트 클라우드 맵 상에서, 상기 차량으로부터 일정 거리 내에 존재하는 포인트들의 그룹(이하 '슬라이딩 윈도우'라 한다)이고,상기 단계(a1)에서, 인 경우 일치하는 것으로 판단하고,여기서 는 정합 점수(fitness score), 은 기 설정된 오차 기준값이며,로 산출되고,여기서, t는 특정시점, 는 상기 입력 라이다 포인트의 좌표로서, 차량을 원점으로 한 바디좌표계(body coordinates)로 표시된 좌표, 는 상기 슬라이딩 윈도우 내 포인트의 좌표로서, 상기 3차원 포인트 클라우드 맵 상의 특정점을 원점으로 하는 제1 월드좌표계(world coordinates)로 표시된 좌표이며,는 제1 월드좌표계의 원점에서 상기 차량의 현재 위치까지의 회전 행렬, 는 제1 월드좌표계의 원점에서 상기 차량의 현재 위치까지의 평행이동 행렬이고,는 상기 입력 라이다 포인트 값을 제1 월드좌표계(world coordinates)로 변환한 포인트 좌표이며,상기 단계(a1)에서 일치하는 것으로 판단되었으면, 상기 단계(a2)에서 상기 차량의 위치를, 그 시점의 상기 및 상기 로 업데이트 하는,3차원 지도를 이용한 차선 지도를 구축하기 위한, 컴퓨터로 판독 가능한 비일시적 저장 매체에 저장된 컴퓨터 프로그램. |
| 16 | 3차원 지도를 이용한 차선 지도를 구축하기 위한 시스템으로서,적어도 하나의 프로세서; 및컴퓨터로 실행가능한 명령을 저장하는 적어도 하나의 메모리를 포함하되,상기 적어도 하나의 메모리에 저장된 상기 컴퓨터로 실행가능한 명령은, 상기 적어도 하나의 프로세서에 의하여, (a) 주행중인 차량에 부착된 라이다(LiDAR) 센서에서 스캔(scan)하여 수집한 데이터를 이용하여, 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 상기 차량의 위치를 결정하는 단계;(b) 상기 차량에 설치된 카메라가 캡쳐한 이미지로부터 차선(lane)을 감지하는 단계;(c) 3차원 포인트 클라우드 맵(3D point cloud map) 상에서의 상기 차선의 위치를 결정하는 단계; 및,(d) 상기 단계(c)에서 결정된 상기 차선의 위치를, 차선을 나타내는 포인트로서 차선 레벨 지도에 누적시키는 단계가 실행되도록 하고,상기 단계(a)는,(a1) 라이다(LiDAR)에서 스캔하여 수집한 차량 주변 사물에 대한 다수의 포인트(이하 '입력 라이다 포인트'라 한다)를 상기 3차원 포인트 클라우드 맵 상의 포인트 그룹(이하 '타겟 포인트 그룹'이라 한다)과 매칭시켜 일치하는 경우를 찾는 단계;(a2) 일치하는 경우를 찾으면, 상기 차량의 위치를 상기 3차원 포인트 클라우드 맵 상의 좌표로 결정하는 단계를 포함하며,상기 타겟 포인트 그룹은,상기 3차원 포인트 클라우드 맵 상에서, 상기 차량으로부터 일정 거리 내에 존재하는 포인트들의 그룹(이하 '슬라이딩 윈도우'라 한다)이고,상기 단계(a1)에서, 인 경우 일치하는 것으로 판단하고,여기서 는 정합 점수(fitness score), 은 기 설정된 오차 기준값이며,로 산출되고,여기서, t는 특정시점, 는 상기 입력 라이다 포인트의 좌표로서, 차량을 원점으로 한 바디좌표계(body coordinates)로 표시된 좌표, 는 상기 슬라이딩 윈도우 내 포인트의 좌표로서, 상기 3차원 포인트 클라우드 맵 상의 특정점을 원점으로 하는 제1 월드좌표계(world coordinates)로 표시된 좌표이며,는 제1 월드좌표계의 원점에서 상기 차량의 현재 위치까지의 회전 행렬, 는 제1 월드좌표계의 원점에서 상기 차량의 현재 위치까지의 평행이동 행렬이고,는 상기 입력 라이다 포인트 값을 제1 월드좌표계(world coordinates)로 변환한 포인트 좌표이며,상기 단계(a1)에서 일치하는 것으로 판단되었으면, 상기 단계(a2)에서 상기 차량의 위치를, 그 시점의 상기 및 상기 로 업데이트 하는,3차원 지도를 이용한 차선 지도를 구축하기 위한 시스템. |
| 17 | 청구항 1의 방법으로 구축된 차선 레벨(lane-level) 지도(이하 '차선 레벨 지도'라 한다)를 이용하여 주행을 위한 노드-링크 기반의 경로 계획(route planning)을 생성하는 방법으로서,(a) 상기 차선 레벨 지도에서 일정 간격으로 노드(node) 및, 하나 이상의 노드를 포함하는 링크(link)를 생성하는 단계;(b) 생성된 전체 노드-링크에 대하여, 링크간 연결성을 갖는 아키텍쳐(architecture)인 로드 그래프(road-graph)를 생성하는 단계;(c) 주행의 목적지를 입력받는 단계;(d) 차량의 위치를 추정하고, 추정된 차량의 위치로부터 가장 가까운 노드를 결정하는 단계;(e) 상기 목적지로 수신된 위치로부터 가장 가까운 노드를 결정하는 단계;(f) 출발지 노드가 포함된 링크로부터 시작하여, 각 링크에서 연결된 다음 링크로 경로 계획을 위한 탐색(이하 '프로파게이트(propagate)'라 한다)을 수행하면서, 각 링크에 대한 비용 점수(cost score)를 산출하여 누적시키는 단계;(g) 상기 목적지로 수신된 위치로부터 가장 가까운 노드에 도달시 상기 프로파게이트를 중단하는 단계;(h) 상기 출발지에서 상기 목적지까지의 누적된 비용 점수가 가장 낮은 경로를 최종 경로로 결정하는 단계; 및,(i) 주행의 목적지 입력이 있는 경우, 상기 단계(c) 내지 단계(i)를 수행하는 단계를 포함하는 노드-링크 기반 경로 계획(route planning) 생성 방법. |
| 18 | 청구항 17에 있어서,상기 비용 점수에는,해당 링크의 길이가 포함되는 것을 특징으로 하는 노드-링크 기반 경로 계획(route planning) 생성 방법. |
| 19 | 청구항 18에 있어서,생성된 각 링크에는, 경로 계획에 사용될 속성정보가 자동으로 부여되고,상기 비용 점수에는,해당 링크의 속성정보에 따른 점수가 가산되는 것을 특징으로 하는 노드-링크 기반 경로 계획(route planning) 생성 방법. |
| 20 | 청구항 1의 방법으로 구축된 차선 레벨(lane-level) 지도(이하 '차선 레벨 지도'라 한다)를 이용하여 주행을 위한 노드-링크 기반의 경로 계획(route planning)을 생성하기 위한, 컴퓨터로 판독 가능한 비일시적 저장 매체에 저장된 컴퓨터 프로그램으로서,비일시적 저장 매체에 저장되며, 프로세서에 의하여,(a) 상기 차선 레벨 지도에서 일정 간격으로 노드(node) 및, 하나 이상의 노드를 포함하는 링크(link)를 생성하는 단계;(b) 생성된 전체 노드-링크에 대하여, 링크간 연결성을 갖는 아키텍쳐(architecture)인 로드 그래프(road-graph)를 생성하는 단계;(c) 주행의 목적지를 입력받는 단계;(d) 차량의 위치를 추정하고, 추정된 차량의 위치로부터 가장 가까운 노드를 결정하는 단계;(e) 상기 목적지로 수신된 위치로부터 가장 가까운 노드를 결정하는 단계;(f) 출발지 노드가 포함된 링크로부터 시작하여, 각 링크에서 연결된 다음 링크로 경로 계획을 위한 탐색(이하 '프로파게이트(propagate)'라 한다)을 수행하면서, 각 링크에 대한 비용 점수(cost score)를 누적시키는 단계;(g) 상기 목적지로 수신된 위치로부터 가장 가까운 노드에 도착시 상기 프로파게이트를 중단하는 단계;(h) 상기 출발지에서 상기 목적지까지의 누적된 비용 점수가 가장 낮은 경로를 최종 경로로 결정하는 단계; 및,(i) 주행의 목적지 입력이 있는 경우, 상기 단계(c) 내지 단계(i)를 수행하는 단계가 실행되도록 하는 명령을 포함하는, 차선 레벨 지도를 이용하여 주행을 위한 노드-링크 기반의 경로 계획(route planning)을 생성하기 위한, 컴퓨터로 판독 가능한 비일시적 저장 매체에 저장된 컴퓨터 프로그램. |
| 21 | 청구항 1의 방법으로 구축된 차선 레벨(lane-level) 지도(이하 '차선 레벨 지도'라 한다)를 이용하여 주행을 위한 노드-링크 기반의 경로 계획(route planning)을 생성하기 위한 장치로서,적어도 하나의 프로세서; 및컴퓨터로 실행가능한 명령을 저장하는 적어도 하나의 메모리를 포함하되,상기 적어도 하나의 메모리에 저장된 상기 컴퓨터로 실행가능한 명령은, 상기 적어도 하나의 프로세서에 의하여, (a) 상기 차선 레벨 지도에서 일정 간격으로 노드(node) 및, 하나 이상의 노드를 포함하는 링크(link)를 생성하는 단계;(b) 생성된 전체 노드-링크에 대하여, 링크간 연결성을 갖는 아키텍쳐(architecture)인 로드 그래프(road-graph)를 생성하는 단계;(c) 주행의 목적지를 입력받는 단계;(d) 차량의 위치를 추정하고, 추정된 차량의 위치로부터 가장 가까운 노드를 결정하는 단계;(e) 상기 목적지로 수신된 위치로부터 가장 가까운 노드를 결정하는 단계;(f) 출발지 노드가 포함된 링크로부터 시작하여, 각 링크에서 연결된 다음 링크로 경로 계획을 위한 탐색(이하 '프로파게이트(propagate)'라 한다)을 수행하면서, 각 링크에 대한 비용 점수(cost score)를 누적시키는 단계;(g) 상기 목적지로 수신된 위치로부터 가장 가까운 노드에 도착시 상기 프로파게이트를 중단하는 단계;(h) 상기 출발지에서 상기 목적지까지의 누적된 비용 점수가 가장 낮은 경로를 최종 경로로 결정하는 단계; 및,(i) 주행의 목적지 입력이 있는 경우, 상기 단계(c) 내지 단계(i)를 수행하는 단계가 실행되도록 하는 차선 레벨 지도를 이용하여 주행을 위한 노드-링크 기반의 경로 계획(route planning)을 생성하기 위한 장치. |