| 번호 | 청구항 |
|---|---|
| 18 | 제17 항에 있어서,상기 프로세서는 상기 발사체의 매크로 모션에 의한 궤적의 움직임 보상을 이용하여 상기 반사된 신호의 메인도플러 신호로부터 마이크로도플러 신호를 분리하는, 발사체 식별 장치. |
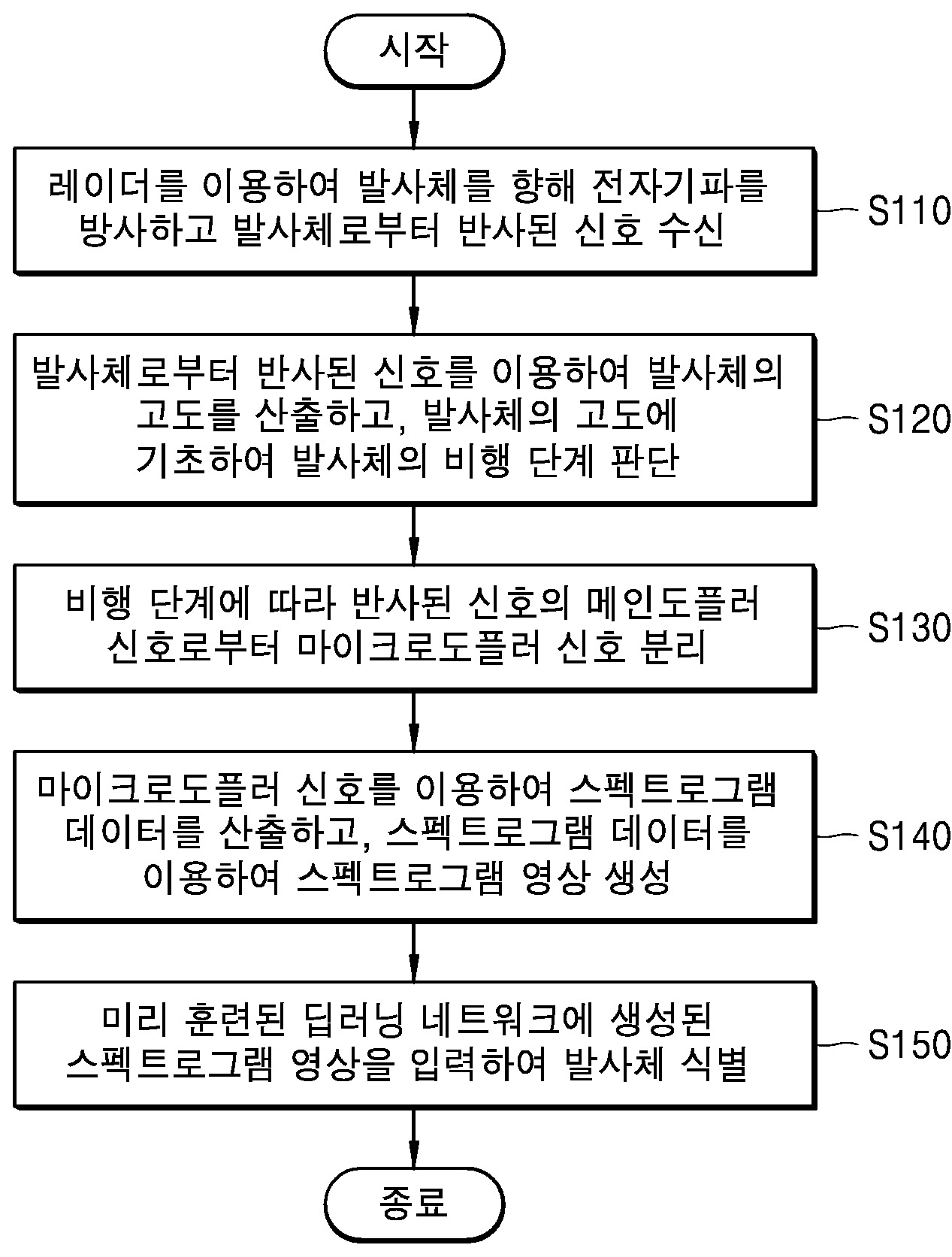
| 1 | 공중에서 비행하는 발사체를 식별하는 방법에 있어서,레이더를 이용하여 상기 발사체를 향해 전자기파를 방사하고 상기 발사체로부터 반사된 신호를 수신하는 단계;상기 발사체로부터 반사된 신호를 이용하여 상기 발사체의 고도를 산출하고, 상기 발사체의 고도에 기초하여 상기 발사체의 비행 단계를 판단하는 단계;상기 비행 단계에 따라 상기 반사된 신호의 메인도플러 신호로부터 마이크로도플러 신호를 분리하는 단계;상기 마이크로도플러 신호를 이용하여 스펙트로그램 데이터를 산출하고, 상기 스펙트로그램 데이터를 이용하여 스펙트로그램 영상을 생성하는 단계; 및미리 훈련된 딥러닝 네트워크에 생성된 상기 스펙트로그램 영상을 입력하여 상기 발사체를 식별하는 단계를 포함하고,상기 발사체의 비행 단계를 판단하는 단계는, 상기 발사체로부터 반사된 신호를 이용하여 상기 레이더로부터 상기 발사체까지의 거리, 상기 발사체의 속도, 상기 발사체의 궤적을 산출하는 단계; 상기 발사체의 궤적에 대한 데이터에 기초하여 상기 발사체의 코닝축과 상기 레이더의 레이더 가시선 사이의 각도를 계산하는 단계; 및상기 발사체의 궤적에 대한 데이터를 지속 업데이트하는 단계를 포함하고,상기 스펙트로그램 영상을 생성하는 단계는, 상기 발사체의 코닝축과 상기 레이더 가시선 사이의 각도를 이용하여 상기 마이크로도플러 신호의 마이크로도플러 주파수를 스케일링 하여 스펙트로그램 데이터를 산출하는 단계; 및상기 스펙트로그램 데이터에 기초하여 시간에 따른 주파수의 2차원 행렬 형태의 스펙트로그램 영상을 생성하는 단계를 포함하는, 발사체 식별 방법. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 제1 항에 있어서,상기 스펙트로그램 영상을 생성하는 단계는, 상기 마이크로도플러 신호에 기초하여 시간에 따른 마이크로도플러 주파수 변화를 나타내는 스펙트로그램 데이터를 산출하는 단계; 및 상기 스펙트로그램 데이터에 기초하여 시간에 따른 주파수의 2차원 행렬 형태의 스펙트로그램 영상을 생성하는 단계를 포함하는, 발사체 식별 방법. |
| 5 | 제4 항에 있어서,상기 스펙트로그램 영상을 생성하는 단계는, 상기 스펙트로그램 데이터를 푸리에 변환(Fourier transform)하여 CVD(Cadence Velocity Diagram) 데이터를 산출하는 단계; 및 상기 CVD 데이터에 기초하여 시간에 따른 2차원 행렬 형태의 CVD 영상을 생성하는 단계를 포함하는, 발사체 식별 방법. |
| 6 | 제1 항에 있어서,상기 비행 단계는 부스트 단계, 중간 단계, 및 종말 단계를 포함하고,상기 발사체의 비행 단계를 판단하는 단계는, 상기 발사체의 고도가 고도 120km이상인 경우 상기 비행 단계를 상기 중간 단계로 판단하는 단계인, 발사체 식별 방법. |
| 7 | 제6 항에 있어서,상기 발사체의 마이크로도플러 신호를 분리하는 단계는, 상기 비행 단계가 상기 중간 단계로 판단되는 경우 상기 반사된 신호의 메인도플러 신호로부터 마이크로도플러 신호를 분리하는 단계인, 발사체 식별 방법. |
| 8 | 제7 항에 있어서,상기 발사체의 마이크로도플러 신호를 분리하는 단계는, 상기 발사체의 매크로 모션에 의한 궤적의 움직임 보상을 이용하여 상기 반사된 신호의 메인도플러 신호로부터 마이크로도플러 신호를 분리하는 단계인, 발사체 식별 방법. |
| 9 | 제1 항에 있어서,상기 발사체를 식별하는 단계는, 상기 발사체를 탄두, 파편, 및 디코이 중 어느 하나로 분류하는 제1 단계; 상기 탄두, 상기 파편, 및 상기 디코이 중 어느 하나로 분류된 상기 발사체에 대하여 상기 탄두의 종류, 상기 파편의 종류, 및 상기 디코이의 종류 중 어느 하나를 분류하는 제2 단계; 상기 제1 단계 및 상기 제2 단계의 각 분류에 대한 확률을 산출하는 단계; 및 산출된 확률의 값이 미리 결정된 임계값 이상인 경우 상기 발사체의 위협도를 판단하고, 상기 위협도에 따라 상기 발사체의 지속 추적 여부를 결정하는 단계를 포함하는, 발사체 식별 방법. |
| 10 | 컴퓨팅 장치를 이용하여 제1 항 및 제4 항 내지 제9 항 중 어느 한 항의 방법을 실행시키기 위하여 기록매체에 저장된 컴퓨터 프로그램. |
| 11 | 공중에서 비행하는 발사체를 향해 전자기파를 방사하고, 상기 발사체로부터 반사된 신호를 수신하는 레이더; 및프로세서;를 포함하고,상기 프로세서는, 상기 발사체로부터 반사된 신호를 이용하여 상기 발사체의 고도를 산출하고, 상기 발사체의 고도에 기초하여 상기 발사체의 비행 단계를 판단하고, 상기 비행 단계에 따라 상기 반사된 신호의 메인도플러 신호로부터 마이크로도플러 신호를 분리하고, 상기 마이크로도플러 신호를 이용하여 스펙트로그램 데이터를 산출하고, 상기 스펙트로그램 데이터를 이용하여 스펙트로그램 영상을 생성하고, 미리 훈련된 딥러닝 네트워크에 생성된 상기 스펙트로그램 영상을 입력하여 상기 발사체를 식별하고,상기 프로세서는, 상기 발사체로부터 반사된 신호를 이용하여 상기 레이더로부터 상기 발사체까지의 거리, 상기 발사체의 속도, 상기 발사체의 궤적을 산출하고, 상기 발사체의 궤적에 대한 데이터에 기초하여 상기 발사체의 코닝축과 상기 레이더의 레이더 가시선 사이의 각도를 계산하고, 상기 발사체의 궤적에 대한 데이터를 지속 업데이트하고,상기 스펙트로그램 영상은 스펙트로그램 데이터에 기초하여 시간에 따른 주파수의 2차원 행렬 형태의 영상으로 생성되고, 상기 스펙트로그램 데이터는 상기 발사체의 코닝축과 상기 레이더 가시선 사이의 각도를 이용하여 상기 마이크로도플러 신호의 마이크로도플러 주파수를 스케일링 하여 산출되는, 발사체 식별 장치. |
| 12 | 삭제 |
| 13 | 삭제 |
| 14 | 제11 항에 있어서,상기 스펙트로그램 영상은 시간에 따른 마이크로도플러 주파수 변화를 나타내는 스펙트로그램 데이터에 기초하여 시간에 따른 주파수의 2차원 행렬 형태의 영상으로 생성되고, 상기 스펙트로그램 데이터는 상기 마이크로도플러 신호에 기초하여 산출되는, 발사체 식별 장치. |
| 15 | 제14 항에 있어서,상기 프로세서는 상기 스펙트로그램 데이터를 푸리에 변환(Fourier transform)하여 CVD(Cadence Velocity Diagram) 데이터를 산출하고, 상기 CVD 데이터에 기초하여 시간에 따른 2차원 행렬 형태의 CVD 영상을 생성하는, 발사체 식별 장치. |
| 16 | 제11 항에 있어서,상기 비행 단계는 부스트 단계, 중간 단계, 및 종말 단계를 포함하고,상기 프로세서는 상기 발사체의 고도가 고도 120km이상인 경우 상기 비행 단계를 상기 중간 단계로 판단하는, 발사체 식별 장치. |
| 17 | 제16 항에 있어서,상기 프로세서는 상기 비행 단계가 상기 중간 단계로 판단되는 경우 상기 반사된 신호의 메인도플러 신호로부터 마이크로도플러 신호를 분리하는, 발사체 식별 장치. |
| 19 | 제11 항에 있어서,상기 프로세서는 상기 발사체를 탄두, 파편, 및 디코이 중 어느 하나로 분류하는 제1 단계 분류를 수행하고, 상기 탄두, 상기 파편, 및 상기 디코이 중 어느하나로 분류된 상기 발사체에 대하여 상기 탄두의 종류, 상기 파편의 종류, 및 상기 디코이의 종류 중 어느 하나를 분류하는 제2 단계 분류를 수행하고, 상기 제1 단계 분류 및 상기 제2 단계 분류의 각 분류에 대한 확률을 산출하고, 산출된 확률의 값이 미리 결정된 임계값 이상인 경우 상기 발사체의 위협도를 판단하고, 상기 위협도에 따라 상기 발사체의 지속 추적 여부를 결정하는, 발사체 식별 장치. |