| 번호 | 청구항 |
|---|---|
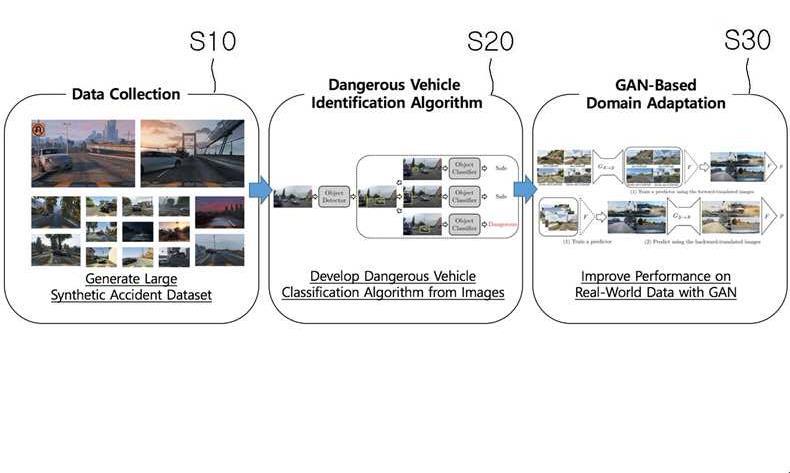
| 1 | 차량 사고 예측 시스템의 차량 사고 예측 방법에 있어서,비디오 프로그램의 실행 상태를 변경하여 게임 플레이어 차량과의 충돌 이미지들 및 비충돌 이미지들을 포함하는 가상의 사고 데이터를 수집하는 단계; 및상기 가상의 사고 데이터를 학습 알고리즘에 적용하여 훈련된 학습 데이터를 기반으로 차량의 충돌 사고 여부에 대한 판단을 수행하는 단계를 포함하는 것을 특징으로 하는 차량 사고 예측 방법. |
| 2 | 제1항에 있어서,상기 차량의 충돌 사고 여부에 대한 판단을 수행하는 단계 전에,실제 현실에서 동영상을 촬영하여 획득한 차량 충돌 및 비충돌 이미지들을 포함하는 현실 도메인의 데이터를 상기 비디오 프로그램의 장면이 될 비디오 프로그램 도메인의 데이터로 각 이미지들을 매핑시켜 변환하고 상기 학습 데이터에 더 반영하는 단계를 더 포함하는 것을 특징으로 하는 차량 사고 예측 방법. |
| 3 | 제1항에 있어서,상기 가상의 사고 데이터를 수집하는 단계에서,상기 비디오 프로그램의 화면 내부의 도시에서 도로를 자율 주행하면서, 특정 차량과 충돌 이전의 소정의 시간동안의 복수의 이미지들을 포함하는 충돌 이미지들 및 충돌이 없는 정상 주행 시간 동안의 복수의 비충돌 이미지들을 메모리에 저장하는 것을 특징으로 하는 차량 사고 예측 방법. |
| 4 | 제1항에 있어서,상기 차량의 충돌 사고 여부에 대한 판단을 수행하는 단계는,입력 이미지 내의 차량을 탐지하여 바운딩 박스의 정보를 추출하는 단계; 및상기 입력 이미지에서 대상 차량의 바운딩 박스에 대한 분석에 상기 훈련된 학습 데이터를 적용하여 해당 차량에 대한 위험 또는 안전 여부를 판단하는 단계 를 포함하는 것을 특징으로 하는 차량 사고 예측 방법. |
| 5 | 제4항에 있어서,상기 입력 이미지에서 상기 대상 차량의 바퀴 각도, 차체 각도, 거리, 또는 속도에 대한 정보를 더 반영하여 학습을 수행하고 축적된 훈련 학습 데이터를 이용해 해당 차량에 대한 위험 또는 안전 여부를 판단하는 것을 특징으로 하는 차량 사고 예측 방법. |
| 6 | 제4항에 있어서,상기 차량의 충돌 사고 여부에 대한 판단을 수행하는 단계는,CNN(Convolutional Neural Network)에 기반한 상기 학습 알고리즘을 이용해 상기 훈련된 학습 데이터를 축적하기 위하여, 판단 대상 시점 이전의 d개의 이미지(d는 자연수)를 상기 바운딩 박스의 내부와 외부를 구분하는 정보로 이루어진 바이너리 맵으로 각각 변환하는 단계;각각의 상기 바이너리 맵을 기초로 2개의 인접 이미지들의 바운딩 박스의 각 화소의 이동 벡터를 포함하는 (d-1) 개의 광학 흐름정보를 산출하는 단계; 및상기 d개의 이미지, 상기 d개의 바이너리 맵, 상기 (d-1)개의 광학 흐름정보를 CNN 학습 알고리즘으로 훈련시키는 단계를 포함하는 것을 특징으로 하는 차량 사고 예측 방법. |
| 7 | 비디오 프로그램의 실행 상태를 변경하여 게임 플레이어 차량과의 충돌 이미지들 및 비충돌 이미지들을 포함하는 가상의 사고 데이터를 수집하는 수집부; 및상기 가상의 사고 데이터를 학습 알고리즘에 적용하여 훈련된 학습 데이터를 기반으로 차량의 충돌 사고 여부에 대한 판단을 수행하는 예측부를 포함하는 것을 특징으로 하는 차량 사고 예측 시스템. |
| 8 | 비디오 프로그램의 실행 상태를 변경하여 게임 플레이어 차량과의 충돌 이미지들 및 비충돌 이미지들을 포함하는 가상의 사고 데이터를 수집하는 기능; 및상기 가상의 사고 데이터를 학습 알고리즘에 적용하여 훈련된 학습 데이터를 기반으로 차량의 충돌 사고 여부에 대한 판단을 수행하는 기능을 실현하기 위한 컴퓨터가 읽을 수 있는 코드로 구현된 기록매체. |