| 번호 | 청구항 |
|---|---|
| 8 | 제5항에 있어서,상기 기하학 정보는 상기 하나 이상의 빈 각각으로부터 상기 라이다 센서까지의 거리인 것을 특징으로 하는 잡음제거장치. |
| 1 | 하나 이상의 라이다 센서를 이용하여 수집된 포인트를 기초로 포인트 클라우드(point cloud)를 형성하는 과정;하나 이상의 빈(bin)을 기초로, 상기 포인트 클라우드를 인코딩하는 과정;상기 하나 이상의 빈 각각에 포함된 포인트 클라우드의 컨텍스트 정보(context information) 및 상기 하나 이상의 빈 각각에 포함된 포인트 클라우드의 기하학 정보(geometry information) 중 하나 이상을 추출하는 과정;상기 컨텍스트 정보 및 상기 기하학 정보를 기초로 임계값을 계산하는 과정; 및상기 임계값을 기초로 상기 포인트 클라우드에 포함된 잡음(noise)을 제거하는 과정을 포함하는 잡음제거방법. |
| 2 | 제1항에 있어서,상기 포인트 클라우드는 지면이 제거된 포인트 클라우드인 것을 특징으로 하는 잡음제거방법. |
| 3 | 제1항에 있어서,상기 컨텍스트 정보는 상기 하나 이상의 빈 각각에 포함된 포인트의 수인 것을 특징으로 하는 잡음제거방법. |
| 4 | 제1항에 있어서,상기 기하학 정보는 상기 하나 이상의 빈 각각으로부터 상기 라이다 센서까지의 거리인 것을 특징으로 하는 잡음제거방법. |
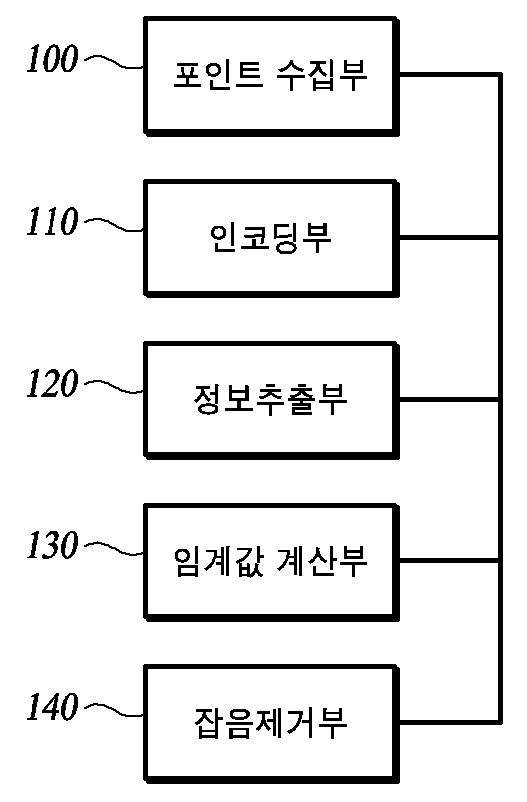
| 5 | 하나 이상의 라이다 센서를 이용하여 수집된 포인트를 기초로 포인트 클라우드(point cloud)를 형성하는 포인트 수집부;하나 이상의 빈(bin)을 기초로, 상기 포인트 클라우드를 인코딩하는 인코딩부;상기 하나 이상의 빈(bin) 각각에 포함된 포인트 클라우드의 컨텍스트 정보(context information) 및 기하학 정보(geometry information) 중 하나 이상을 추출하는 정보추출부;상기 컨텍스트 정보 및 상기 기하학 정보 중 하나 이상을 기초로 임계값을 계산하는 임계값 계산부; 및상기 임계값을 기초로 상기 포인트 클라우드에 포함된 잡음(noise)을 제거하는 잡음제거부를 포함하는 잡음제거장치. |
| 6 | 제5항에 있어서,상기 포인트 클라우드는 지면이 제거된 포인트 클라우드인 것을 특징으로 하는 잡음제거장치. |
| 7 | 제5항에 있어서,상기 컨텍스트 정보는 상기 하나 이상의 빈 각각에 포함된 포인트의 수인 것을 특징으로 하는 잡음제거장치. |