| 번호 | 청구항 |
|---|---|
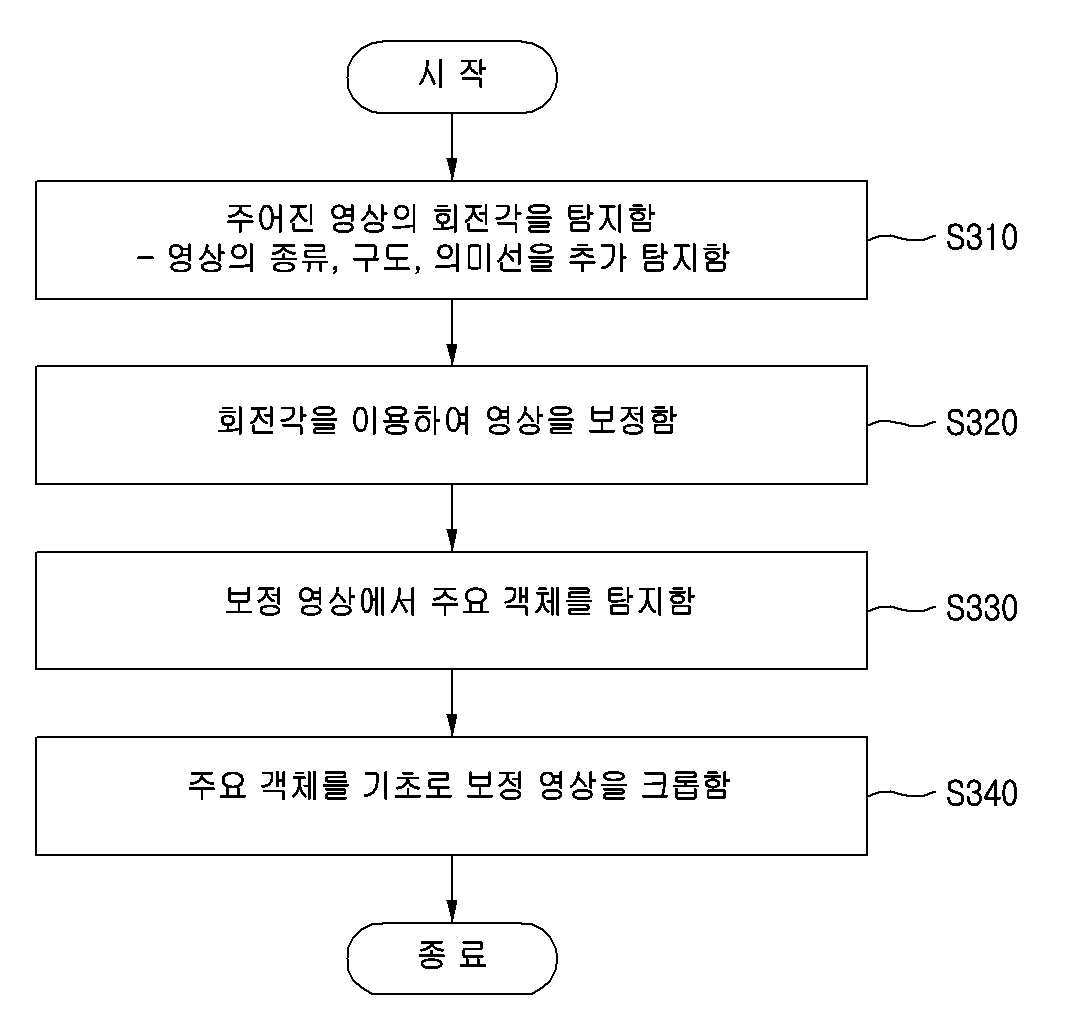
| 1 | 컴퓨터 장치에서 실행되는 영상 구도 개선 방법에 있어서,상기 컴퓨터 장치는 메모리에 포함된 컴퓨터 판독가능한 명령들을 실행하도록 구성된 적어도 하나의 프로세서를 포함하고,상기 영상 구도 개선 방법은,상기 적어도 하나의 프로세서에 의해, 딥러닝 모델을 통해 타겟 영상의 회전각을 탐지하는 단계;상기 적어도 하나의 프로세서에 의해, 상기 회전각을 이용한 영상 회전을 통해 상기 타겟 영상을 보정하는 단계;상기 적어도 하나의 프로세서에 의해, 딥러닝 모델을 통해 상기 보정된 타겟 영상인 보정 영상에서 객체를 탐지하는 단계; 및상기 적어도 하나의 프로세서에 의해, 상기 객체를 기초로 상기 보정 영상을 크롭(crop)하여 크롭 영상을 구도가 개선된 최종 영상으로 획득하는 단계를 포함하는 영상 구도 개선 방법. |
| 2 | 삭제 |
| 3 | 제1항에 있어서,상기 객체를 탐지하는 단계는,상기 보정 영상을 이용하여 복수 개의 해상도를 가진 특징 맵을 추출하는 단계; 및상기 복수 개의 특징 맵을 이용하여 상기 보정 영상에서 상기 객체를 탐지하는 단계를 포함하는 영상 구도 개선 방법. |
| 4 | 제1항에 있어서,상기 객체를 탐지하는 단계는,상기 보정 영상에서 추출된 특징 맵을 이용하여 후보 객체를 탐지하는 단계; 및상기 후보 객체 중 상기 보정 영상의 중심과 최소 거리인 객체를 주요 객체로 선별하는 단계를 포함하고,상기 크롭 영상을 구도가 개선된 최종 영상으로 획득하는 단계는,상기 주요 객체를 기준으로 상기 보정 영상을 크롭하는 단계를 포함하는 영상 구도 개선 방법. |
| 5 | 제1항에 있어서,상기 크롭 영상을 구도가 개선된 최종 영상으로 획득하는 단계는,상기 객체를 기준으로 크롭 후보 영역을 생성하는 단계; 및딥 러닝 모델을 통한 상기 크롭 후보 영역 간의 비교를 통해 최종 크롭 영역을 선택하는 단계를 포함하는 영상 구도 개선 방법. |
| 6 | 제5항에 있어서,상기 크롭 후보 영역을 생성하는 단계는,상기 객체의 중심점을 기준으로 최소 크기 영역과 최대 크기 영역 내에서 일정 간격으로 상기 크롭 후보 영역을 생성하는 것을 특징으로 하는 영상 구도 개선 방법. |
| 7 | 제5항에 있어서,상기 최종 크롭 영역을 선택하는 단계는,비교 대상인 두 크롭 후보 영역에 대해 각 크롭 후보 영역의 특징 맵, 공통 영역의 특징 맵, 고유 영역의 특징 맵, 및 전체 영상의 특징 맵을 이용하여 상기 두 크롭 후보 영역 간의 순서 관계를 예측하는 단계를 포함하는 영상 구도 개선 방법. |
| 8 | 제5항에 있어서,상기 최종 크롭 영역을 선택하는 단계는,상기 크롭 후보 영역 각각에 대하여 다른 크롭 후보 영역과의 상대적 미적 점수를 결정하여 상기 상대적 미적 점수를 통해 상기 크롭 후보 영역 중에서 상기 최종 크롭 영역을 선택하고,상기 상대적 미적 점수는 크롭 후보 영역 간의 비교 결과를 추정한 확률에 따라 가중합하여 결정되는 것을 특징으로 하는 영상 구도 개선 방법. |
| 9 | 제1항에 있어서,상기 영상 구도 개선 방법은,상기 적어도 하나의 프로세서에 의해, 딥러닝 모델을 통해 상기 타겟 영상의 정보로서 피사체 종류에 따른 영상 종류, 상기 영상 종류에 따른 영상 구도, 및 영상 내 영역 구분을 위한 의미선 중 적어도 하나를 탐지하는 단계를 더 포함하는 영상 구도 개선 방법. |
| 10 | 컴퓨터 장치에서 실행되는 영상 구도 개선 방법에 있어서,상기 컴퓨터 장치는 메모리에 포함된 컴퓨터 판독가능한 명령들을 실행하도록 구성된 적어도 하나의 프로세서를 포함하고,상기 영상 구도 개선 방법은,상기 적어도 하나의 프로세서에 의해, 딥러닝 모델을 통해 타겟 영상에서 객체를 탐지하는 단계; 및상기 적어도 하나의 프로세서에 의해, 상기 객체를 기초로 상기 타겟 영상을 크롭(crop)하여 크롭 영상을 구도가 개선된 최종 영상으로 획득하는 단계를 포함하고,상기 영상 구도 개선 방법은,상기 적어도 하나의 프로세서에 의해, 상기 타겟 영상의 정보로서 영상 내 영역 구분을 위한 의미선을 탐지하는 단계를 더 포함하고,상기 의미선을 탐지하는 단계는,상기 타겟 영상에 대한 허프 공간(Hough space)을 이용하여 후보선을 생성하는 단계; 및상기 후보선의 의미선 확률 예측을 통해 적어도 하나의 후보선을 상기 의미선으로 선택하는 단계를 포함하는 영상 구도 개선 방법. |
| 11 | 제1항, 제3항 내지 제10항 중 어느 한 항의 영상 구도 개선 방법을 컴퓨터에 실행시키기 위해 컴퓨터 판독가능한 기록 매체에 저장되는 컴퓨터 프로그램. |
| 12 | 컴퓨터 장치에 있어서,메모리에 포함된 컴퓨터 판독가능한 명령들을 실행하도록 구성된 적어도 하나의 프로세서를 포함하고,상기 적어도 하나의 프로세서는,딥러닝 모델을 통해 타겟 영상의 회전각을 탐지하는 과정;상기 회전각을 이용한 영상 회전을 통해 상기 타겟 영상을 보정하는 과정딥러닝 모델을 통해 상기 보정된 타겟 영상인 보정 영상에서 객체를 탐지하는 과정; 및상기 객체를 기초로 상기 보정 영상을 크롭하여 크롭 영상을 구도가 개선된 최종 영상으로 획득하는 과정을 처리하는 컴퓨터 장치. |
| 13 | 삭제 |
| 14 | 제12항에 있어서,상기 적어도 하나의 프로세서는,상기 보정 영상을 이용하여 복수 개의 해상도를 가진 특징 맵을 추출하고,상기 복수 개의 특징 맵을 이용하여 상기 보정 영상에서 상기 객체를 탐지하는 것을 특징으로 하는 컴퓨터 장치. |
| 15 | 제12항에 있어서,상기 적어도 하나의 프로세서는,상기 보정 영상에서 추출된 특징 맵을 이용하여 후보 객체를 탐지하고,상기 후보 객체 중 상기 보정 영상의 중심과 최소 거리인 객체를 주요 객체로 선별하고,상기 주요 객체를 기준으로 상기 보정 영상을 크롭하는 것을 특징으로 하는 컴퓨터 장치. |
| 16 | 제12항에 있어서,상기 적어도 하나의 프로세서는,상기 객체를 기준으로 크롭 후보 영역을 생성하고,딥 러닝 모델을 통한 상기 크롭 후보 영역 간의 비교를 통해 최종 크롭 영역을 선택하는 것을 특징으로 하는 컴퓨터 장치. |
| 17 | 제16항에 있어서,상기 적어도 하나의 프로세서는,상기 객체의 중심점을 기준으로 최소 크기 영역과 최대 크기 영역 내에서 일정 간격으로 상기 크롭 후보 영역을 생성하는 것을 특징으로 하는 컴퓨터 장치. |
| 18 | 제16항에 있어서,상기 적어도 하나의 프로세서는,비교 대상인 두 크롭 후보 영역에 대해 각 크롭 후보 영역의 특징 맵, 공통 영역의 특징 맵, 고유 영역의 특징 맵, 및 전체 영상의 특징 맵을 이용하여 상기 두 크롭 후보 영역 간의 순서 관계를 예측하는 것을 특징으로 하는 컴퓨터 장치. |
| 19 | 제12항에 있어서,상기 적어도 하나의 프로세서는,딥러닝 모델을 통해 상기 타겟 영상의 정보로서 피사체 종류에 따른 영상 종류, 상기 영상 종류에 따른 영상 구도, 및 영상 내 영역 구분을 위한 의미선 중 적어도 하나를 탐지하는 것을 특징으로 하는 컴퓨터 장치. |
| 20 | 컴퓨터 장치에 있어서,메모리에 포함된 컴퓨터 판독가능한 명령들을 실행하도록 구성된 적어도 하나의 프로세서를 포함하고,상기 적어도 하나의 프로세서는,딥러닝 모델을 통해 타겟 영상에서 객체를 탐지하는 과정; 및상기 객체를 기초로 상기 타겟 영상을 크롭하여 크롭 영상을 구도가 개선된 최종 영상으로 획득하는 과정을 처리하고,상기 적어도 하나의 프로세서는,상기 타겟 영상의 정보로서 영상 내 영역 구분을 위한 의미선을 탐지하는 것으로,상기 타겟 영상에 대한 허프 공간을 이용하여 후보선을 생성하고,상기 후보선의 의미선 확률 예측을 통해 적어도 하나의 후보선을 상기 의미선으로 선택하는 것을 특징으로 하는 컴퓨터 장치. |