| 번호 | 청구항 |
|---|---|
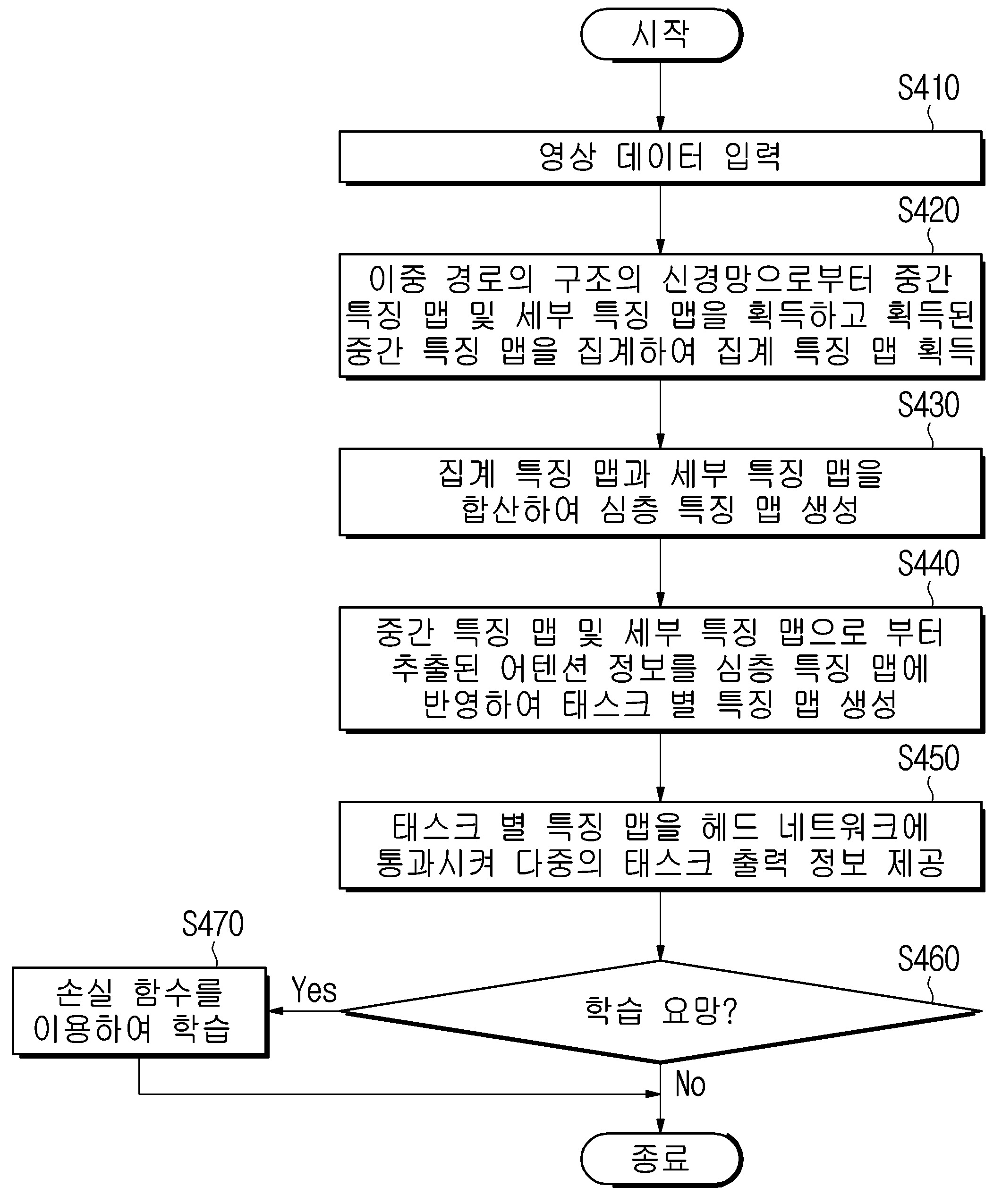
| 1 | 인공지능에 기반한 다중 태스크 처리 방법에 있어서, 영상 데이터가 입력된 이중 경로 구조의 신경망의 저해상도 경로에 배열된 복수의 레이어로부터 순차적으로 생성되면서 인접하는 중간 특징 맵을 집계하여 집계 특징 맵을 획득함과 아울러서, 고해상도 경로로부터 세부 특징 맵을 획득하는 단계;상기 집계 특징 맵과 상기 세부 특징 맵에 기반하여 심층 특징 맵을 생성하는 단계;상기 중간 특징 맵으로부터 추출된 각 태스크에 대한 태스크 별 채널 어텐션(Task-specific channel attention) 및 상기 세부 특징 맵으로부터 추출된 태스크 공통 공간 어텐션(Task-generic spatial attention)을 포함하는 어텐션 정보를 생성하는 단계; 및 상기 어텐션 정보를 상기 심층 특징 맵에 반영하여 각 태스크에 대한 태스크 별 특징 맵을 생성함과 아울러서, 상기 태스크 별 특징 맵을 추론하여 다중의 태스크 출력 정보를 제공하는 단계를 포함하는, 다중 태스크 처리 방법. |
| 2 | 제 1항에 있어서,상기 집계 특징 맵을 획득하는 것은,상기 집계 특징 맵을 획득하는 단계의 출력으로 단일의 상기 집계 특징 맵이 산출될 때까지 상기 복수의 레이어 중 인접한 레이어로부터의 상기 집계 특징 맵을 재귀적으로 집계하는 것인, 다중 태스크 처리 방법. |
| 3 | 제 1항에 있어서,상기 집계 특징 맵을 획득하는 것은,인접한 상기 중간 특징 맵 중 낮은 해상도를 갖는 상기 중간 특징 맵에 이중 선형 보간(bilinear interpolation)을 적용하여 상기 낮은 해상도를 갖는 중간 특징 맵을 업샘플링(Upsampling)하고, 상기 업샘플링된 상기 중간 특징 맵 및 인접한 상기 중간 특징 맵 중 높은 해상도를 갖는 상기 중간 특징 맵을 병합하는 것인, 다중 태스크 처리 방법. |
| 4 | 제 1항에 있어서,상기 세부 특징 맵을 획득하는 것은,상기 저해상도 경로에서 최저 해상도와 관련된 레이어보다 높은 해상도를 갖는 레이어로부터 생성된 상기 중간 특징 맵을 기초로 상기 세부 특징 맵을 획득하는 것인, 다중 태스크 처리 방법. |
| 5 | 제 1항에 있어서,상기 심층 특징 맵을 생성하는 단계는,상기 이중 선형 보간을 통해 상기 집계 특징 맵을 업샘플링하는 단계;컨볼루션 레이어를 통해 상기 세부 특징 맵의 채널 차원을 상기 업샘플링된 집계 특징 맵의 채널 차원에 정합하는 단계; 및상기 업샘플링된 집계 특징 맵과 상기 정합된 채널 차원을 갖는 세부 특징 맵을 요소별 합산하여 상기 심층 특징 맵을 생성하는 단계를 포함하는, 다중 태스크 처리 방법. |
| 6 | 제 1항에 있어서,상기 태스크 별 채널 어텐션은,상기 태스크마다 복수로 생성되며, 상기 태스크 별 채널 어텐션은 각 태스크에 대응하는 채널 어텐션 레이어에 상기 중간 특징 맵을 입력하여 출력된 값에 활성화 함수를 적용함으로써 취득되며, 상기 채널 어텐션 레이어는 전역 평균 풀링(Global Average Pooling)을 수반하는 다층 신경망으로 구성되는, 다중 태스크 처리 방법. |
| 7 | 제 6 항에 있어서,상기 태스크 별 채널 어텐션을 생성하기 위해 입력되는 상기 중간 특징 맵은 상기 저해상도 경로에서 최저 해상도를 갖는 중간 특징 맵인, 다중 태스크 처리 방법. |
| 8 | 제 1항에 있어서,상기 태스크 공통 공간 어텐션은,확장 컨볼루션(Dilated Convolution)을 포함하는 태스크 공통 공간 어텐션 레이어에 상기 세부 특징 맵을 입력하여 출력된 값에 활성화 함수를 적용함으로써 획득되는, 다중 태스크 처리 방법. |
| 9 | 제 1항에 있어서,상기 다중의 태스크 출력 정보는,상호 상이한 특성을 갖는 상기 영상 데이터의 분석 정보들을 포함하고, 상기 분석 정보는 객체 분류 정보, 의미론적 분할(semantic segmentatioin) 및 깊이 정보 중 적어도 2 개의 정보를 포함하는, 다중 태스크 처리 방법. |
| 10 | 제 1항에 있어서,상기 다중의 태스크 출력 정보를 제공하는 단계는,상기 태스크 별 특징 맵에 따라 상기 다중의 태스크를 출력하는 멀티 헤드 구조의 헤드 네트워크를 이용하는 것을 포함하고, 상기 멀티 헤드 구조는 상기 태스크마다 할당되는 헤드 레이어를 가지며, 상기 헤드 레이어는 컨볼루션 레이어 및 활성화 함수를 포함하는, 다중 태스크 처리 방법. |
| 11 | 모빌리티 장치의 외부 환경 및 장치 내부 상태와 관련된 데이터를 획득하는, 영상 데이터를 적어도 획득하는 센서부; 적어도 하나의 인스트럭션을 저장하는 메모리; 및 상기 메모리부터 획득된 데이터에 기초하여 상기 메모리에 저장된 상기 적어도 하나의 인스트럭션을 실행하는 프로세서를 포함하고, 상기 프로세서는,영상 데이터가 입력된 이중 경로 구조의 신경망의 저해상도 경로에 배열된 복수의 레이어로부터 순차적으로 생성되면서 인접하는 중간 특징 맵을 집계하여 집계 특징 맵을 획득함과 아울러서, 고해상도 경로로부터 세부 특징 맵을 획득하고;상기 집계 특징 맵과 상기 세부 특징 맵에 기반하여 심층 특징 맵을 생성하고;상기 중간 특징 맵으로부터 추출된 각 태스크에 대한 태스크 별 채널 어텐션(Task-specific channel attention) 및 상기 세부 특징 맵으로부터 추출된 태스크 공통 공간 어텐션(Task-generic spatial attention)을 포함하는 어텐션 정보를 생성하고;상기 어텐션 정보를 상기 심층 특징 맵에 반영하여 각 태스크에 대한 태스크 별 특징 맵을 생성함과 아울러서, 상기 태스크 별 특징 맵을 추론하여 다중의 태스크 출력 정보를 제공하는, 모빌리티 장치. |
| 12 | 제 11항에 있어서,상기 집계 특징 맵을 획득하는 것은,상기 집계 특징 맵을 획득하는 것의 출력으로 단일의 상기 집계 특징 맵이 산출될 때까지 상기 복수의 레이어 중 인접한 레이어로부터의 상기 집계 특징 맵을 재귀적으로 집계하는 것인, 모빌리티 장치. |
| 13 | 제 11항에 있어서,상기 집계 특징 맵을 획득하는 것은,인접한 상기 중간 특징 맵 중 낮은 해상도를 갖는 상기 중간 특징 맵에 이중 선형 보간(bilinear interpolation)을 적용하여 상기 낮은 해상도를 갖는 중간 특징 맵을 업샘플링(Upsampling)하고, 상기 업샘플링된 상기 중간 특징 맵 및 인접한 상기 중간 특징 맵 중 높은 해상도를 갖는 상기 중간 특징 맵을 병합하는 것인, 모빌리티 장치. |
| 14 | 제 11항에 있어서,상기 세부 특징 맵을 획득하는 것은,상기 저해상도 경로에서 최저 해상도와 관련된 레이어보다 높은 해상도를 갖는 레이어로부터 생성된 상기 중간 특징 맵을 기초로 상기 세부 특징 맵을 획득하는 것인, 모빌리티 장치. |
| 15 | 제 11항에 있어서,상기 프로세서는,상기 이중 선형 보간을 통해 상기 집계 특징 맵을 업샘플링하고,컨볼루션 레이어를 통해 상기 세부 특징 맵의 채널 차원을 상기 업샘플링된 집계 특징 맵의 채널 차원에 정합하고,상기 업샘플링된 집계 특징 맵과 상기 정합된 채널 차원을 갖는 세부 특징 맵을 요소별 합산하여 상기 심층 특징 맵을 생성하는, 모빌리티 장치. |
| 16 | 제 11항에 있어서,상기 태스크 별 채널 어텐션은,상기 태스크마다 복수로 생성되며, 상기 태스크 별 채널 어텐션은 각 태스크에 대응하는 채널 어텐션 레이어에 상기 중간 특징 맵을 입력하여 출력된 값에 활성화 함수를 적용함으로써 취득되며, 상기 채널 어텐션 레이어는 전역 평균 풀링(Global Average Pooling)을 수반하는 다층 신경망으로 구성되는, 모빌리티 장치. |
| 17 | 제 16 항에 있어서,상기 태스크 별 채널 어텐션을 생성하기 위해 입력되는 상기 중간 특징 맵은 상기 저해상도 경로에서 최저 해상도를 갖는 중간 특징 맵인, 모빌리티 장치. |
| 18 | 제 11항에 있어서,상기 태스크 공통 공간 어텐션은,확장 컨볼루션(Dilated Convolution)을 포함하는 태스크 공통 공간 어텐션 레이어에 상기 세부 특징 맵을 입력하여 출력된 값에 활성화 함수를 적용함으로써 획득되는, 모빌리티 장치. |
| 19 | 제 11항에 있어서,상기 다중의 태스크 출력 정보는,상호 상이한 특성을 갖는 상기 영상 데이터의 분석 정보들을 포함하고, 상기 분석 정보는 객체 분류 정보, 의미론적 분할(semantic segmentatioin) 및 깊이 정보 중 적어도 2 개의 정보를 포함하는, 모빌리티 장치. |
| 20 | 제 11항에 있어서,상기 프로세서는,상기 태스크 별 특징 맵에 따라 상기 다중의 태스크를 출력하는 멀티 헤드 구조의 헤드 네트워크를 이용하는 것을 포함하고, 상기 멀티 헤드 구조는 상기 태스크마다 할당되는 헤드 레이어를 가지며, 상기 헤드 레이어는 컨볼루션 레이어 및 활성화 함수를 포함하는, 모빌리티 장치. |