| 번호 | 청구항 |
|---|---|
| 1 | (a) 적어도 하나의 LiDAR 센서로부터 소정 주기마다 원시 프레임을 각각 획득하는 단계-상기 원시 프레임은 복수의 채널과 수평각에 따른 복수의 포인트를 포함함; 및(b) 이전 원시 프레임과 현재 원시 프레임을 비교하여 갱신된 포인트에 대한 거리값만 LiDAR 전송 프로토콜에 적재하는 단계를 포함하되,상기 (b) 단계는, 상기 이전 원시 프레임과 상기 현재 원시 프레임에서 각 포인트의 거리값의 차이값을 계산하는 단계; 및상기 계산된 차이값이 임계치 이상인 포인트의 거리값만 상기 LiDAR 전송 프로토콜에 적재하는 단계를 포함하되,상기 갱신된 포인트는 상기 현재 원시 프레임의 포인트인 것을 특징으로 하는 LiDAR 데이터 전송량 경량화 방법. |
| 2 | 삭제 |
| 3 | 삭제 |
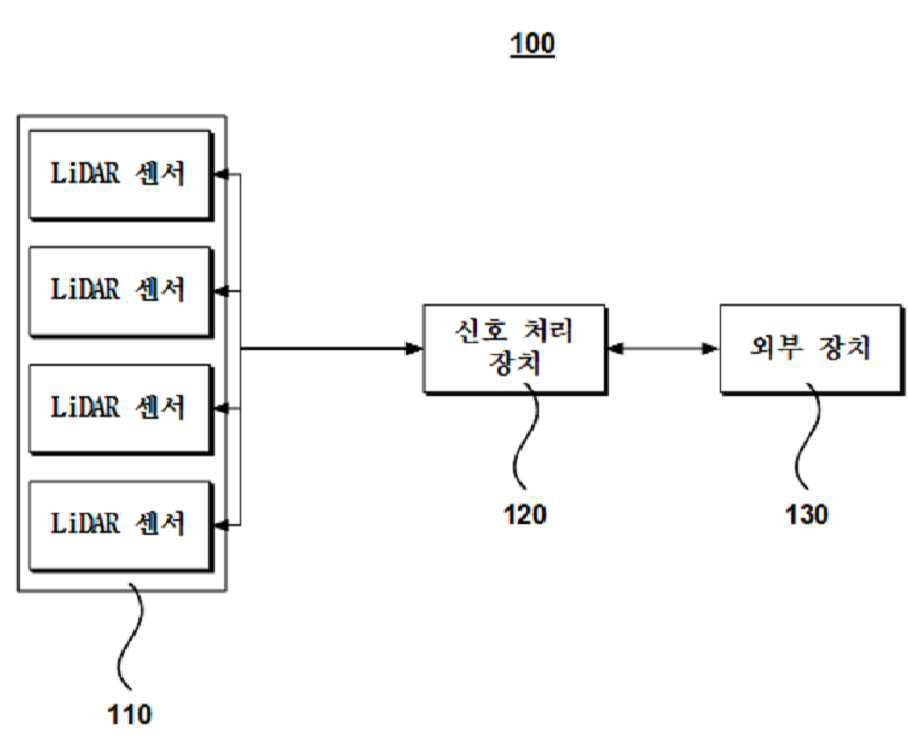
| 4 | LiDAR 센서; 및상기 LiDAR 센서와 물리적 신호 라인을 통해 연결되되, 상기 LiDAR 센서로부터 소정 주기마다 원시 프레임을 각각 획득한 후 이전 원시 프레임과 현재 원시 프레임을 비교하여 갱신된 포인트에 대한 거리값만 LiDAR 전송 프로토콜에 적재하여 외부 장치로 전송하는 신호 처리 장치를 포함하되,상기 신호 처리 장치는, 상기 이전 원시 프레임과 상기 현재 원시 프레임에서 각 포인트의 거리값의 차이값을 계산하고, 상기 계산된 차이값이 임계치 이상인 포인트의 거리값만 상기 LiDAR 전송 프로토콜에 적재하되, 상기 갱신된 포인트는 상기 현재 원시 프레임의 포인트인 것을 특징으로 하는 시스템. |
| 5 | 삭제 |
| 6 | 제4 항에 있어서,상기 신호 처리 장치는,상기 계산된 차이값이 임계치 미만인 포인트의 거리값은 제거하여 상기 LiDAR 전송 프로토콜에 미적재하는 것을 특징으로 하는 시스템. |
| 7 | LiDAR 센서로부터 소정 주기마다 원시 프레임을 획득한 후 이전 원시 프레임과 현재 원시 프레임을 비교하여 갱신된 포인트를 선별하고, 상기 선별된 포인트에 대한 정보를 전달하는 클라이언트 프로세스; 및상기 선별된 포인트에 대한 정보를 기초로 LiDAR 전송 프로토콜을 생성하여 외부 장치로 전송하는 서버 프로세스를 포함하되,상기 클라이언트 프로세스는 LiDAR 센서의 개수만큼 생성되되,상기 선별된 포인트에 대한 정보는, 이전 원시 프레임과 상기 현재 원시 프레임에서 각 포인트의 거리값의 차이값이 임계치 이상인 포인트의 거리값과 포인트 데이터 제거 여부를 나타내는 플래그 값이며,상기 갱신된 포인트는 상기 현재 원시 프레임의 포인트인 것을 특징으로 하는 신호 처리 장치. |
| 8 | 삭제 |
| 9 | 삭제 |
| 10 | 삭제 |