| 번호 | 청구항 |
|---|---|
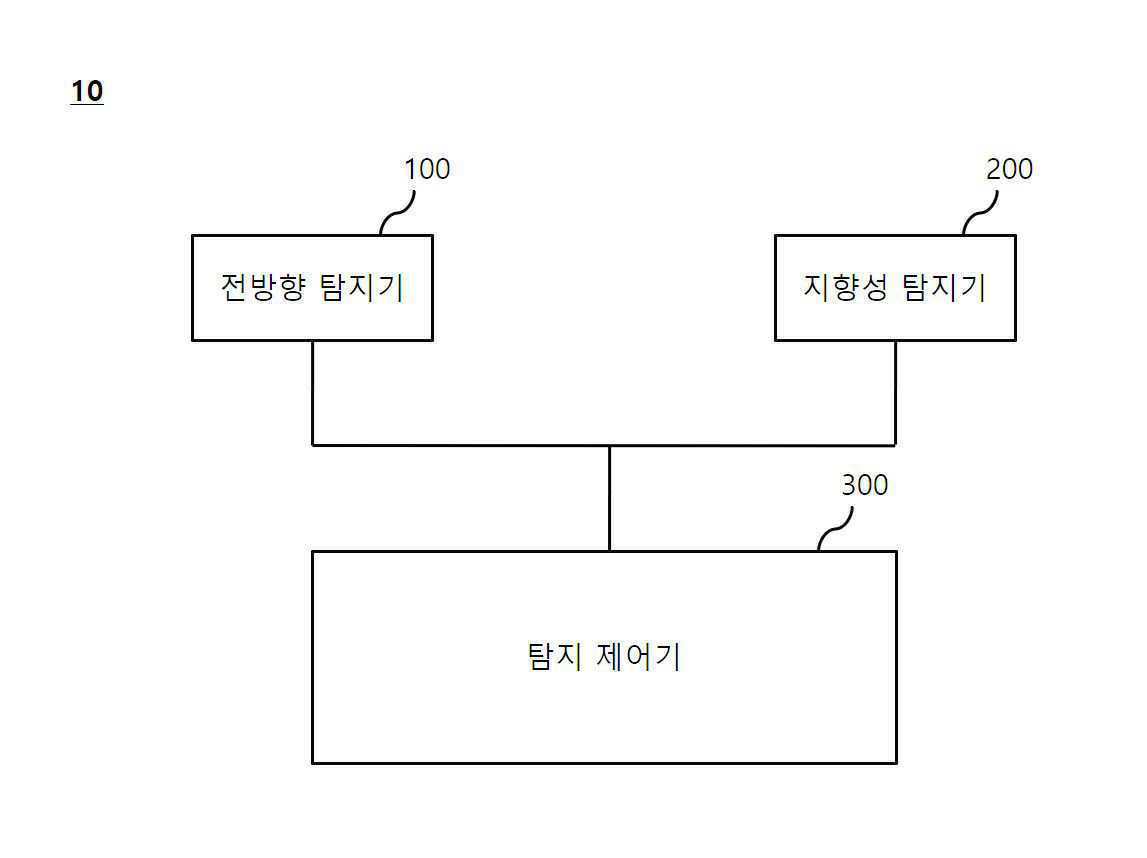
| 1 | 제1 지점에 설치되고, 제1 지점을 기준으로 360도 내에 존재하는 드론을 탐지하여 탐지된 드론에 대한 제1 탐지각을 제공하는 전방향 탐지기;상기 제1 지점과 상이한 제2 지점에 설치되어 지향 구동 신호에 따라 회전하고, 소정 각도 내에 존재하는 드론을 탐지하여 탐지된 드론에 대한 제2 탐지각을 제공하는 지향성 탐지기; 및상기 제1 탐지각을 이용하여 상기 지향성 탐지기의 구동 각도를 산출하고, 산출된 상기 구동 각도에 대한 상기 지향 구동 신호를 상기 지향성 탐지기에 제공하는 탐지 제어기를 포함하고,상기 지향성 탐지기는 지향성 재머를 포함하고,상기 지향성 재머는 소정 각도 내에 존재하는 드론에 대하여 교란 전파를 송출하여 탐지된 드론의 구동을 정지시키고, 상기 전방향 탐지기의 신호 수신부와 연동하여, 드론의 종류 또는 프로토콜을 확인하고, 확인된 드론의 종류 또는 프로토콜에 대응되는 재밍 신호를 생성하여 재밍을 수행하고,상기 탐지 제어기는, 상기 전방향 탐지기에서 제공된 제1 탐지각을 이용하여 드론의 추정 위치를 산출하고, 상기 추정 위치에 대하여 상기 지향성 탐지기로 재 탐지하여 상기 제2 탐지각을 산출하고, 상기 제1 탐지각 및 상기 제2 탐지각을 이용하여 드론의 위치를 탐지하기 위하여,상기 제1 지점에 대하여 상기 제1 탐지각을 적용하여 탐지 직선을 설정하고, 탐지 직선 내의 한 점을 상기 드론의 추정 위치로 산출하는 추정위치 산출부;상기 제2 지점의 위치를 고려하여, 상기 지향성 탐지기가 상기 탐지 직선 내의 한 점을 향하도록 상기 구동 각도를 산출하고, 상기 구동 각도에 대한 상기 지향 구동신호를 생성하는 구동신호 생성부; 및 상기 제1 지점에 대한 상기 제1 탐지각과, 상기 제2 지점에 대한 상기 제2 탐지각을 이용하여 드론의 위치를 산출하는 드론 위치 식별부;을 포함하며,상기 추정위치 산출부는,상기 제1 지점으로부터 사전에 설정된 거리를 적용하여 상기 탐지 직선 내의 한 점을 상기 드론의 추정 위치로 산출하되, 상기 지향성 탐지기가 드론을 탐지하지 못했을 경우, 사전에 설정한 다른 거리를 적용하여 반복 수행하고, 상기 사전에 설정된 거리는 상기 전방향 탐지기의 최대 탐지 거리에 대응되고,상기 드론 위치 식별부는상기 제1 지점에 대한 좌표 정보, 상기 제2 지점에 대한 좌표 정보, 상기 제1 탐지각의 기준선 정보, 상기 제2 탐지각의 기준선 정보, 상기 제1 지점에 대한 제1 탐지각, 상기 제2 지점에 대한 상기 제2 탐지각에 기초하여 상기 제1 지점에서 제1 탐지각을 적용하여 제1 탐지 직선을 설정하고, 상기 제2 지점에서 제2 탐지각을 적용하여 제2 탐지 직선을 설정한 후, 상기 제1 탐지 직선 및 제2 탐지 직선이 교차하는 지점을 드론의 위치로 산출하고,상기 전방향 탐지기는 서로 다른 각도로 설치된 복수의 지향성 탐지기로 구성되며, 상기 지향성 탐지기의 탐지 각도는 60도 내지 90도 내의 각인 것을 특징으로 하는 전방향성 탐지 및 지향성 탐지를 조합 사용하는 드론 탐지 시스템. |