| 번호 | 청구항 |
|---|---|
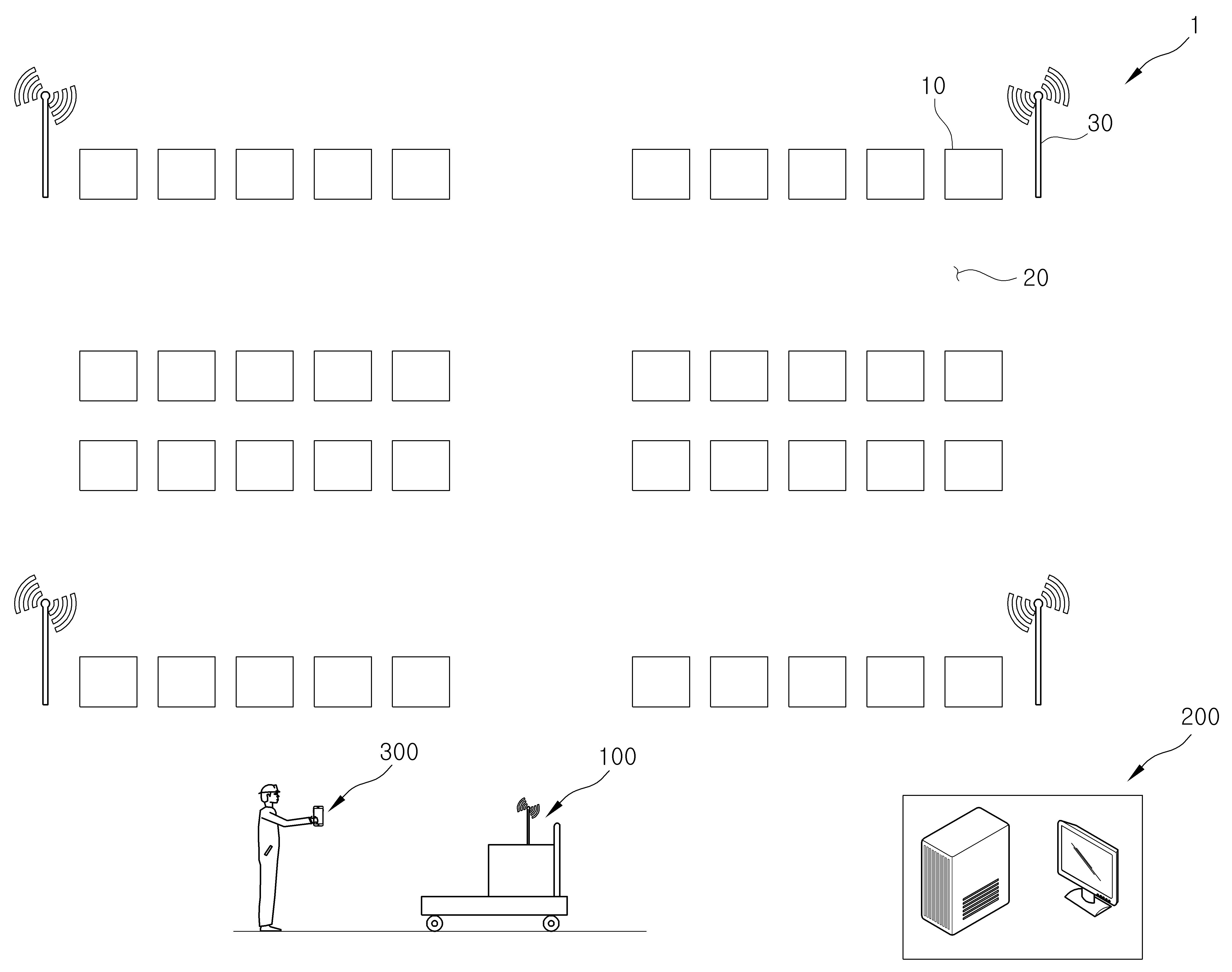
| 1 | 물품을 수용할 수 있는 수용공간이 하나 이상 마련되는 자율형 카트 및 상기 카트를 제어관리하는 서버를 포함하고,상기 카트는 관리자의 체형 및 움직임을 이미지로 수집하거나, 하나 이상의 센서로 관리자를 감지하며, 360회전이 가능하여 상기 카트의 인근에 위치한 관리자의 정보를 수집하는 인식부;상기 인식부에서 인식된 관리자의 신체부위를 좌표화하고, 좌표화된 하나 이상의 좌표데이터 간의 거리 및 기울기를 산출하여 이를 판단하는 좌표부;창고 내부의 지도 이미지 및 경로 안내 데이터가 내장되며, 상기 서버 또는 카트부터 입력되는 피킹지점까지의 경로를 탐색하여 이를 안내하는 경로부; 및좌표간의 거리 및 기울기에 관한 표준데이터가 저장된 제2 DB를 포함하고, 상기 좌표부에서 판단한 데이터 및 상기 제2 DB에 저장된 표준데이터를 상호 매칭하며, 매칭된 표준데이터의 명령어를 산출하여 이를 실행하는 제어부; 를 포함하고,상기 인식부는 관리자의 체형을 이미지로 수집하며, RGB카메라부를 포함하는 카메라부;3D스캐너, 적외선 센서, 자이로 센서, 초음파 센서 및 가속도 센서 중 적어도 하나 이상을 포함하며, 상기 카메라부에서 수집되는 관리자를 감지하는 센서부; 및 상기 카메라부 및 센서부에서 인식된 관리자를 지정하여 상기 카메라부 및 센서부에서 지속적으로 정보 수집하도록 보조하는 인식고정부; 를 포함하며,상기 좌표부는 상기 카트의 현재 위치한 좌표를 산출하는 좌표인식부;상기 인식부에서 수집된 신체부위 정보와 이미지를 매칭하여 신체부위를 좌표화하는 좌표설정부; 및상기 좌표설정부에서 설정된 하나 이상의 좌표를 근거로 좌표간의 거리 및 기울기를 산출하며, 수집된 이미지의 제스처를 판단하는 좌표판단부; 를 포함하고,상기 제어부는 상기 서버, 무선측위부 및 무선컨트롤러간의 무선통신이 가능한 통신부; 및상기 관리자를 기준으로 어느 방향에 위치하는지를 판단하고, 판단한 데이터를 근거로 피킹 지점까지의 경로를 안내하는 이동안내부; 를 포함하는 제스처 인식이 가능한 카트의 자율 주행 시스템. |
| 1 | 물품을 수용할 수 있는 수용공간이 하나 이상 마련되는 자율형 카트 및 상기 카트를 제어관리하는 서버를 포함하고,상기 카트는 관리자의 체형 및 움직임을 이미지로 수집하거나, 하나 이상의 센서로 관리자를 감지하며, 360회전이 가능하여 상기 카트의 인근에 위치한 관리자의 정보를 수집하는 인식부;상기 인식부에서 인식된 관리자의 신체부위를 좌표화하고, 좌표화된 하나 이상의 좌표데이터 간의 거리 및 기울기를 산출하여 이를 판단하는 좌표부;창고 내부의 지도 이미지 및 경로 안내 데이터가 내장되며, 상기 서버 또는 카트부터 입력되는 피킹지점까지의 경로를 탐색하여 이를 안내하는 경로부; 및좌표간의 거리 및 기울기에 관한 표준데이터가 저장된 제2 DB를 포함하고, 상기 좌표부에서 판단한 데이터 및 상기 제2 DB에 저장된 표준데이터를 상호 매칭하며, 매칭된 표준데이터의 명령어를 산출하여 이를 실행하는 제어부; 를 포함하고,상기 인식부는 관리자의 체형을 이미지로 수집하며, RGB카메라부를 포함하는 카메라부;3D스캐너, 적외선 센서, 자이로 센서, 초음파 센서 및 가속도 센서 중 적어도 하나 이상을 포함하며, 상기 카메라부에서 수집되는 관리자를 감지하는 센서부; 및 상기 카메라부 및 센서부에서 인식된 관리자를 지정하여 상기 카메라부 및 센서부에서 지속적으로 정보 수집하도록 보조하는 인식고정부; 를 포함하며,상기 좌표부는 상기 카트의 현재 위치한 좌표를 산출하는 좌표인식부;상기 인식부에서 수집된 신체부위 정보와 이미지를 매칭하여 신체부위를 좌표화하는 좌표설정부; 및상기 좌표설정부에서 설정된 하나 이상의 좌표를 근거로 좌표간의 거리 및 기울기를 산출하며, 수집된 이미지의 제스처를 판단하는 좌표판단부; 를 포함하고,상기 제어부는 상기 서버, 무선측위부 및 무선컨트롤러간의 무선통신이 가능한 통신부; 및상기 관리자를 기준으로 어느 방향에 위치하는지를 판단하고, 판단한 데이터를 근거로 피킹 지점까지의 경로를 안내하는 이동안내부; 를 포함하는 제스처 인식이 가능한 카트의 자율 주행 시스템. |
| 1 | 청구항 1에 있어서,상기 카트가 피킹 지점까지 이송하는 창고의 내부에 일정 간격마다 설치되어 상기 카트의 현재좌표를 산출할 수 있도록 기준좌표가 부여되는 무선측위부;를 포함하는 제스처 인식이 가능한 카트의 자율 주행 시스템. |
| 1 | 청구항 1에 있어서,상기 카트의 운전 및 관리자의 추종하도록 제어하는 무선컨트롤러가 상기 카트로부터 별도로 구비되고,상기 무선컨트롤러는 상기 카트의 기능을 정지 시킨 이후, 모드를 변경시키는 제스처 인식이 가능한 카트의 자율 주행 시스템. |
| 1 | 삭제 |
| 1 | 삭제 |
| 1 | 삭제 |
| 1 | 삭제 |
| 1 | 청구항 1에 있어서,상기 경로부는 상기 카트가 이송하는 창고의 맵 또는 경로에 경로안내 정보가 내장된 제1 DB;상기 제1 DB를 근거로 상기 카트의 이동시간 및 이동거리를 산출하여 최소시간 또는 최소거리를 산출하는 경로산출부; 및상기 창고 내부에 위치하는 피킹 지점을 설정하는 경로관리부;를 포함하는 제스처 인식이 가능한 카트의 자율 주행 시스템. |
| 1 | 청구항 1에 있어서,상기 제2 DB는 제스처의 종류, 제어 명령, 기준좌표 및 인식 거리를 포함한 표준데이터가 저장되는 제스처 인식이 가능한 카트의 자율 주행 시스템. |
| 1 | 삭제 |
| 1 | 삭제 |
| 1 | 청구항 1에 기재된 제스처 인식이 가능한 카트의 자율 주행 시스템의 제스처 인식 방법은카메라부를 통해 관리자를 이미지로 수집하는 단계;상기 수집된 이미지와 동일한 관리자를 센서부에서 감지하여 상기 수집된 이미지의 X축 및 Y축을 산출하는 단계;상기 센서부에서 반사 신호를 상기 관리자에게 송출하여 상기 수집된 이미지의 Z축을 산출하는 단계;상기 수집된 이미지에서 신체부위를 좌표화하는 단계;상기 좌표화된 하나 이상의 좌표데이터 간의 거리 및 기울기를 산출하여 상기 이미지에 매칭된 좌표를 판단하는 단계;상기 판단한 좌표데이터 및 카트에 내장된 제2 DB의 표준데이터를 매칭시키는 단계;상기 매칭된 데이터와 명령화하여 상기 카트를 제어하는 단계;를 포함하는 제스처 인식 방법. |