| 번호 | 청구항 |
|---|---|
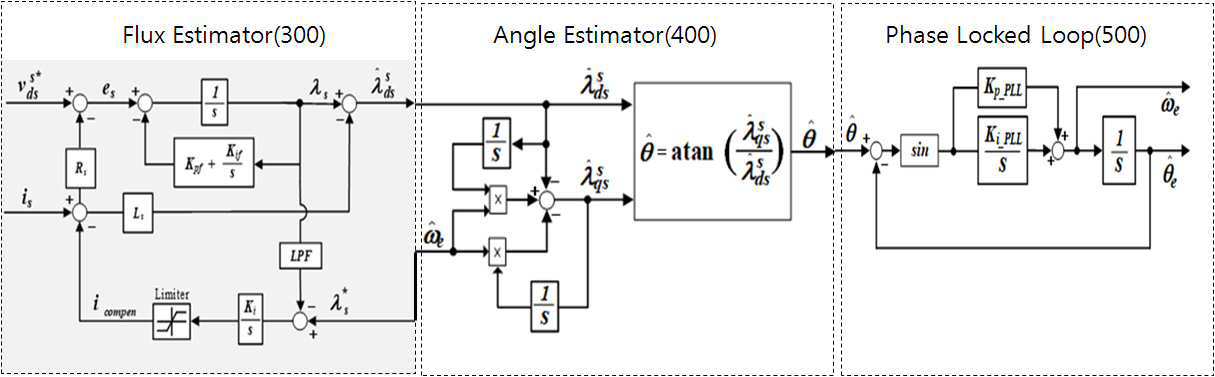
| 1 | 단상 영구자석동기전동기(BLDCM)의 센서리스 운전에 따른 동기 좌표계 DQ축 전류 성분인 DC offset 오류를 포함한 오프셋 전류() 측정하는 단계와;상기 측정된 상전류인 오프셋 전류()로 전동기 전압방정식에 의한 역기전력 정보를 취득하여 모델링을 통해 자속을 추정하기 위한 자속 추정기(Flux Estimator)가 사용되며, 전류 측정 오류에 의해 발생된 상기 DC offset 영향인 발산을 방지하기 위해서는 적분기궤환방식이 채택되는 단계와;상기 자속 추정기로부터 추정된 자속 값을 회전자 위치각 추정기(Angle Estimator)로 전송시켜 전역통과필터(APF,All Pass Filter) 특성을 이용하여 가상의 q축 자속 성분을 생성하여 아크탄젠트(Arc-tangent) 함수[]를 취하여 추정된 회전자 위치각을 얻는 단계와;상기 추정된 회전자 위치각 정보를 토대로 속도를 추정하는 과정에서 발생되는 노이즈 영향을 줄이기 위한 PLL(Phase-Locked Loop)을 사용하여 회전자 위치각 및 속도를 추정하는 단계를 포함하여상기 단상 BLDCM의 센서리스 운전 시 옵셋 오차 보상과 동시에 전류 및 속도 맥동을 저감시키고,상기 자속 추정기의 적분기() 출력 값을 이용한 보상 알고리즘은, 상기 오프셋 전류()를 감지하기 위해 입력 신호에서 직접 사용되며, 상기 자속 추정기의 적분기 출력 값은 LPF(Low Pass Filter)를 통해 상기 오프셋 전류()를 추출한 후, I 컨트롤러()를 사용하여 상기 측정된 오프셋 전류()의 옵셋 오차를 보상하는 것을 특징으로 하는 단상 영구자석동기전동기의 옵셋 오차 보상 방법. |