| 번호 | 청구항 |
|---|---|
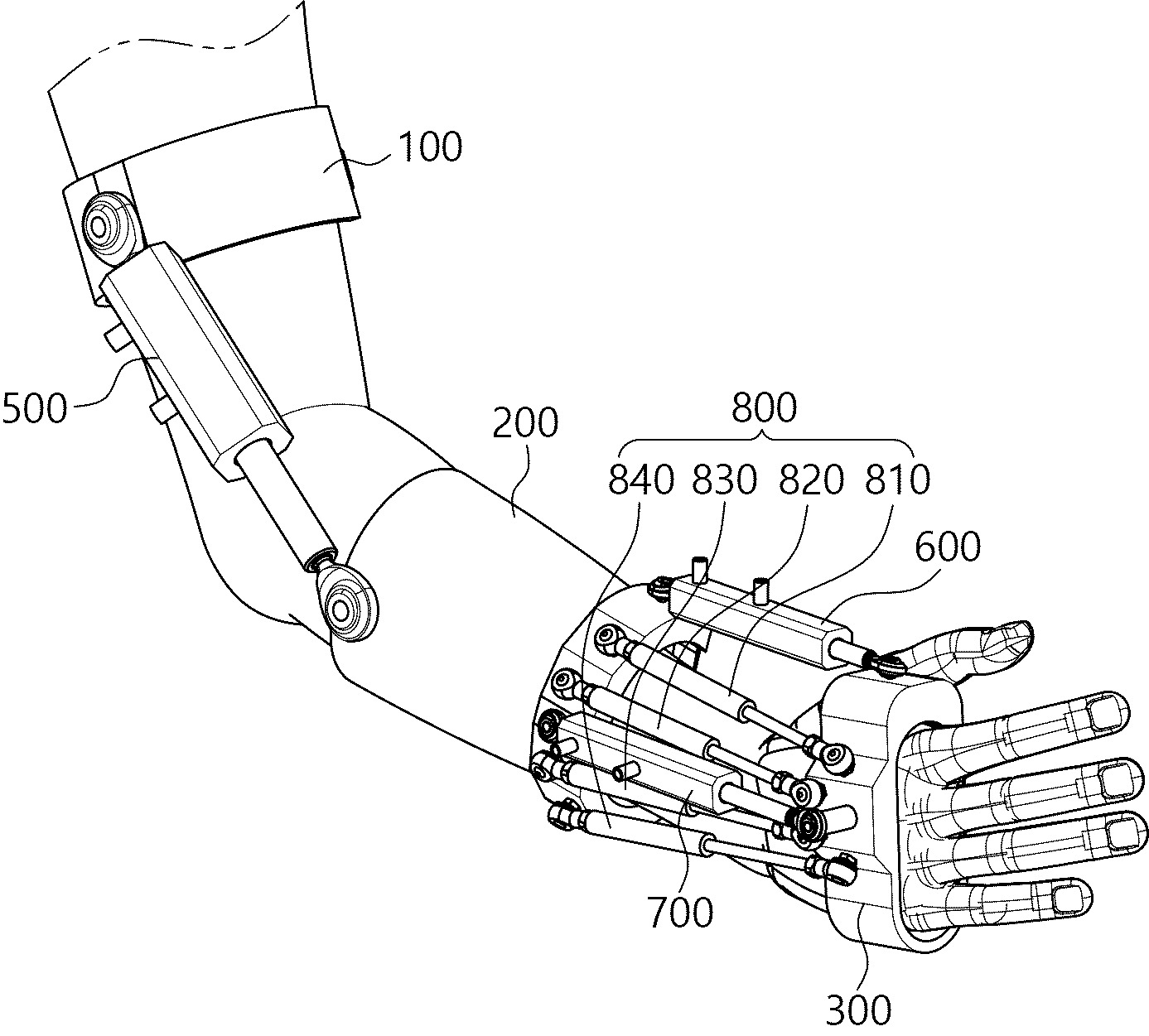
| 1 | 상완에 선택적으로 고정되는 제1 바디; 상기 제1 바디의 일측에 구비되며, 전완에 선택적으로 고정되는 제2 바디; 상기 제2 바디의 일측에 구비되며, 손에 선택적으로 고정되는 제3 바디; 상기 제1 바디 및 제2 바디와 결합되며, 제2 바디가 제1 바디를 기준으로 회전될 수 있도록 하는 제1 구동부; 상기 제2 바디 및 제3 바디와 결합되며, 제3 바디가 제2 바디를 기준으로 일측으로 회전될 수 있도록 하는 제2 구동부; 상기 제2 바디 및 제3 바디와 결합되며, 제3 바디가 제2 바디를 기준으로 다른 일측으로 회전될 수 있도록 하는 제3 구동부; 및 상기 제2 바디 및 제3 바디와 결합되며, 제2 바디 또는 제3 바디의 이동에 따른 미소 변위를 감지하는 센서 수단을 포함하고; 상기 센서 수단은,상기 제2 바디 및 제3 바디와 각각 결합되며, 제2 바디 또는 제3 바디의 이동에 따른 미소 변위를 감지하는 제1 센서부, 제2 센서부, 제3 센서부, 제4 센서부를 포함하며; 그리고상기 제3 바디의 일면에는, 제1 센서부 내지 제4 센서부가 제3 바디에 결합됨에 있어서 제1 센서부 및 제4 센서부가 손등으로부터 수직을 이루는 방향으로 이격되는 거리보다 제2 센서부 및 제3 센서부가 손등으로부터 수직을 이루는 방향으로 이격되는 거리가 더 길어질 수 있도록 하는 돌출부가 형성됨;을 특징으로 하는 다축 웨어러블 로봇. |
| 2 | 제 1 항에 있어서,상기 제1 센서부 또는 제2 센서부 또는 제3 센서부 또는 제4 센서부는,상기 제2 바디 또는 제3 바디의 이동에 따른 미소 변위를 감지하는 센서 부재;상기 센서 부재의 일측에 구비되며, 센서 부재가 제2 바디의 일측에서 회전 가능하게 결합될 수 있도록 하는 제1 조인트 부재;상기 센서 부재의 다른 일측에 구비되며, 센서 부재가 제3 바디의 일측에서 회전 가능하게 결합될 수 있도록 하는 제2 조인트 부재;를 포함하여 구성됨을 특징으로 하는 다축 웨어러블 로봇. |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 삭제 |
| 6 | 상완에 선택적으로 고정되는 제1 바디;상기 제1 바디의 일측에 구비되며, 전완에 선택적으로 고정되는 제2 바디;상기 제2 바디의 일측에 구비되며, 손에 선택적으로 고정되는 제3 바디;상기 제1 바디 및 제2 바디와 결합되며, 제2 바디가 제1 바디를 기준으로 회전될 수 있도록 하는 제1 구동부;상기 제2 바디 및 제3 바디와 결합되며, 제3 바디가 제2 바디를 기준으로 일측으로 회전될 수 있도록 하는 제2 구동부;상기 제2 바디 및 제3 바디와 결합되며, 제3 바디가 제2 바디를 기준으로 다른 일측으로 회전될 수 있도록 하는 제3 구동부;상기 제2 바디 및 제3 바디와 결합되며, 제3 바디가 제2 바디를 기준으로 또 다른 일측으로 회전됨에 있어서 제3 바디와 함께 다른 일측으로 회전 이송됨으로써 센서 수단의 비틀림을 방지하는 이송부;상기 이송부 및 제3 바디와 결합되며, 제2 바디 또는 제3 바디의 이송에 따른 미소 변위를 감지하는 센서 수단;을 포함하여 구성됨을 특징으로 하는 다축 웨어러블 로봇. |
| 7 | 제 6 항에 있어서,상기 센서 수단은,상기 이송부 및 제3 바디와 각각 결합되며, 제2 바디 또는 제3 바디의 이동에 따른 미소 변위를 감지하는 제5 센서부, 제6 센서부, 제7 센서부;를 포함하여 구성됨을 특징으로 하는 다축 웨어러블 로봇. |
| 8 | 제 7 항에 있어서,상기 제5 센서부 또는 제6 센서부 또는 제7 센서부는,상기 제2 바디 또는 제3 바디의 이동에 따른 미소 변위를 감지하는 센서 부재;상기 센서 부재의 일측에 구비되며, 센서 부재가 이송부의 일측에서 회전 가능하게 결합될 수 있도록 하는 제3 조인트 부재;상기 센서 부재의 다른 일측에 구비되며, 센서 부재가 제3 바디의 일측에서 회전 가능하게 결합될 수 있도록 하는 제2 조인트 부재;를 포함하여 구성됨을 특징으로 하는 다축 웨어러블 로봇. |
| 9 | 제 7 항에 있어서,상기 제5 센서부, 제6 센서부, 제7 센서부는 제3 바디의 일면에서 나란히 설치됨을 특징으로 하는 다축 웨어러블 로봇. |
| 10 | 제 6 항에 있어서,상기 제3 바디의 일면에는, 제5 센서부 내지 제7 센서부가 제3 바디에 결합됨에 있어서 제5 센서부 및 제7 센서부가 손등으로부터 수직을 이루는 방향으로 이격되는 거리보다 제6 센서부가 손등으로부터 수직을 이루는 방향으로 이격되는 거리가 더 길어질 수 있도록 하는 돌출부;가 형성됨을 특징으로 하는 다축 웨어러블 로봇. |
| 11 | 제 6 항에 있어서,상기 제2 바디의 일면에는, 이송부의 삽입과 함께 이송부의 회전 이송을 가이드하는 가이드홈;이 형성됨을 특징으로 하는 다축 웨어러블 로봇. |
| 12 | 제 6 항에 있어서,상기 이송부는,상기 제2 바디의 일면에 삽입되면서 제2 바디의 일면을 따라 회전 이송되는 이송 부재;상기 이송 부재의 일측에 구비되며, 제3 바디와 결합되면서 제3 바디가 일측으로 회전될 경우 이송 부재가 회전 이송될 수 있도록 함과 더불어 제3 바디가 다른 일측으로 회전될 경우 탄성 변형되는 변형 부재;를 포함하여 구성됨을 특징으로 하는 다축 웨어러블 로봇. |
| 13 | 제 12 항에 있어서,상기 변형 부재는, 두께에 비해 상대적으로 폭이 넓은 금속 재질임을 특징으로 하는 다축 웨어러블 로봇. |