| 번호 | 청구항 |
|---|---|
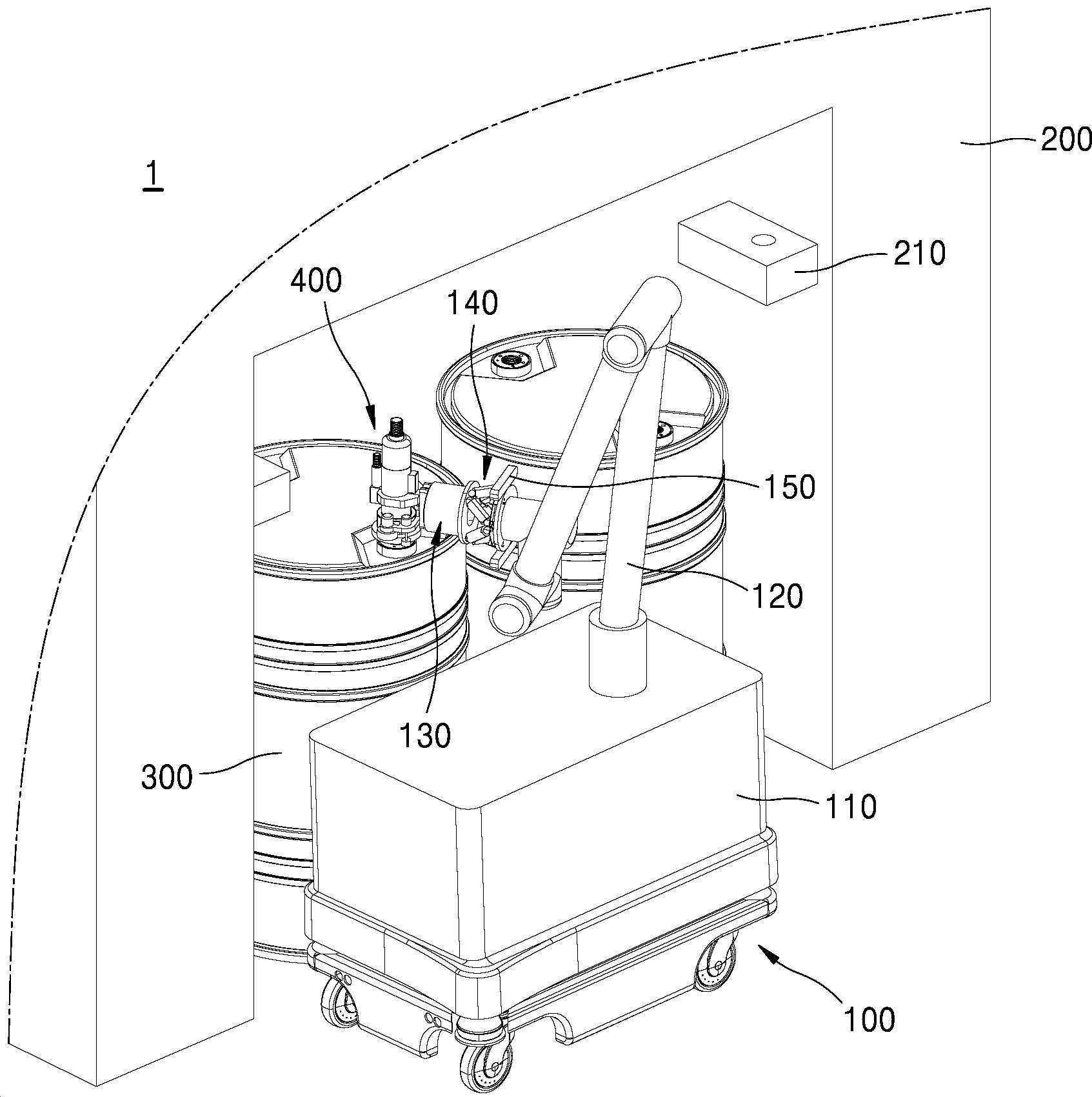
| 1 | 주행부;상기 주행부 상에 배치하는 로봇암;상기 로봇암의 일단에 연결되고, 가해지는 힘 및 토크를 측정 가능하도록 구성된 순응 장치;상기 순응 장치의 일 면에 배치되는 몸체부, 및 커플러를 잡도록 구성된 핑거, 드럼 홀에 위치하는 드럼 키코드와 결합되도록 상기 커플러에 구비된 커플러 키코드와 접촉하여 회전하도록 구성된 제1 롤러, 및 상기 드럼 홀과 상기 커플러에 구비된 커플러 너트가 체결되도록 상기 커플러 너트와 접촉하여 회전하도록 구성된 제2 롤러를 포함하는 커플러 그리퍼;상기 순응 장치의 측면에 구비되는 비전 센서; 및상기 주행부, 상기 로봇암, 상기 커플러 그리퍼, 상기 순응 장치, 및 상기 비전 센서와 연결된 제어부;를 포함하는 드럼 커플링 자동화 로봇. |
| 2 | 제1항에 있어서,상기 제어부는 상기 비전 센서로부터 획득한 시각 정보 및 상기 순응 장치로부터 획득한 측정 값을 기초로 상기 주행부, 상기 로봇암, 및 상기 커플러 그리퍼의 동작을 제어하는 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 3 | 제1항에 있어서,상기 핑거는 한 쌍으로 구비되고,상기 핑거는 상기 몸체부를 기준으로 상하좌우로 이동하고, 상기 커플러의 일부분을 잡거나 놓을 수 있도록 한 쌍의 상기 핑거의 이격 거리를 감소 또는 증가시킬 수 있도록 구성된 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 4 | 제2항에 있어서,상기 제어부는 상기 시각 정보를 기초로 상기 커플러를 상기 드럼 홀에 삽입하고, 상기 커플러 키코드가 상기 드럼 키코드에 체결되도록 상기 제1 롤러를 조절하고, 상기 커플러 너트가 상기 드럼 홀에 체결되도록 상기 제2 롤러를 조절하는 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 5 | 제4항에 있어서,상기 순응 장치는 상기 커플러의 파지 및 상기 커플러가 상기 드럼 홀에 탈착되는 과정에서 발생하는 힘 및 토크를 포함하는 측정 값을 상기 제어부에 송신하고,상기 제어부는 상기 측정 값을 기초로 상기 주행부, 상기 로봇암, 및 상기 커플러 그리퍼의 움직임을 제어하는 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 6 | 제1항에 있어서,상기 커플러 그리퍼는 한 쌍의 롤러 지지부를 더 포함하고,상기 한 쌍의 롤러 지지부는 상기 핑거의 주변에 위치하여 상기 핑거와 일체로서 거동하고,상기 제1 롤러 및 상기 제2 롤러는 서로 이격되어 상기 한 쌍의 롤러 지지부 각각에 위치하는 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 7 | 제2항에 있어서,상기 시각 정보는상기 비전 센서가 획득하는 상기 주행부, 상기 로봇암, 상기 드럼, 상기 드럼 키코드, 상기 드럼 홀, 상기 커플러, 및 상기 커플러 그리퍼의 형태, 위치, 및 방향을 포함하는 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 8 | 제1항에 있어서,상기 순응 장치는상기 로봇암과 상기 커플러 그리퍼 사이에 댐퍼 및 탄성 부재, 및 상기 댐퍼 및 탄성 부재로부터 전달되는 힘 및 토크를 측정하는 센서를 구비하는 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 9 | 제1항에 있어서,선택적인 수작업을 통해 상기 커플러 키코드를 조절하여 상기 커플러 키코드와 상기 드럼 키코드가 결합되고 선택적인 수작업을 통해 상기 커플러 너트를 조절하여 상기 커플러 너트와 상기 드럼 홀이 체결되도록,상기 커플러 키코드 및 상기 커플러 너트는 외부로 노출된 것을 특징으로 하는 드럼 커플링 자동화 로봇. |
| 10 | 제1항에 있어서,상기 주행부는 자율 주행 로봇인 것을 특징으로 하는 드럼 커플링 자동화 로봇. |