| 번호 | 청구항 |
|---|---|
| 1 | 제 12항에 있어서,상기 제 2 로봇 몸체 연결부(530), 제 2 로봇 몸체 플랜지(430), 제 3 탄소섬유바 플랜지(330)가 탄소섬유바로부터 분리되지 않도록 하는 수단; 및상기 제 2 로봇 핸드부 플랜지(440), 제 4 탄소섬유바 플랜지(340)가 탄소섬유바로부터 분리되지 않도록 하는 수단;을 더 포함함을 특징으로 하는 다관절 로봇암. |
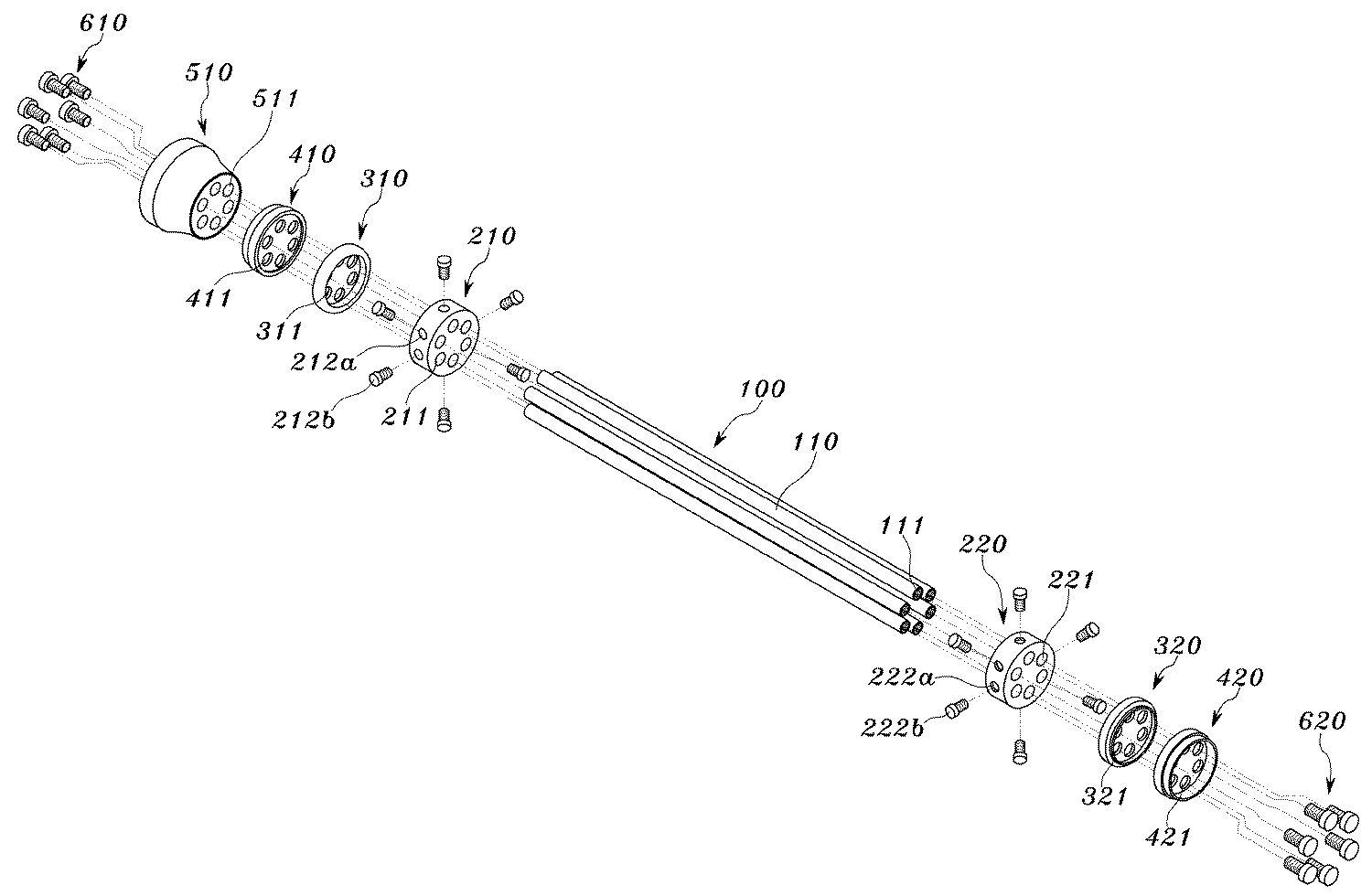
| 1 | 로봇 몸체와 로봇 핸드부 사이에 위치하는 다관절 로봇암에 있어서,상기 다관절 로봇암은, 내부가 중공이고 길이방향으로 길며 양측이 개방된 탄소섬유바(110) 다수개를 원형 또는 다각형으로 배열하여 다발을 이루도록 하고;상기 다수의 탄소섬유바(110)의 양단에 결합되어 다수의 탄소섬유바가 원형 또는 다각형으로 배열되도록 위치 고정시키는 제 1,2 탄소섬유바 플랜지(310, 320);타측이 상기 제 1 탄소섬유바 플랜지(310)의 일측으로 결합되고, 일측이 로봇 몸체와 연결되는 제 1 로봇 몸체 연결부(510);상기 탄소섬유바(110) 일측에 위치하는 제 1 로봇 몸체 연결부(510)와 제 1 탄소섬유바 플랜지(310)가 상기 탄소섬유바 일측으로 결합하기 위한 수단인 제 1 결합구(610);일측이 상기 제 2 탄소섬유바 플랜지(320)의 타측으로 결합되고, 타측이 로봇 핸드부와 연결되는 제 1 로봇 핸드부 플랜지(420); 및상기 탄소섬유바 타측에 위치하는 제 1 로봇 핸드부 플랜지(420)와 제 2 탄소섬유바 플랜지(320)가 상기 탄소섬유바 타측으로 결합하기 위한 수단인 제 2 결합구(620);를 포함함을 특징으로 하는 다관절 로봇암. |
| 1 | 제 1항에 있어서,상기 제 1 탄소섬유바 플랜지(310)와 제 2 탄소섬유바 플랜지(320) 사이에 위치하여 다수의 탄소섬유바간 일정간격을 유지하기 위한 스페이서(210, 220)를 더 구비함을 특징으로 하는 다관절 로봇암. |
| 1 | 제 2항에 있어서,상기 스페이서(210, 220)의 위치를 고정시키기 위한 수단을 더 구비함을 특징으로 하는 다관절 로봇암. |
| 1 | 제 2항에 있어서,상기 스페이서는 전체적으로 원기둥 형상으로, 스페이서에는 탄소섬유바 개수만큼의 홀(211, 221 ; 제 1 홀)이 탄소섬유바 길이방향으로 구비되어 있어, 스페이서에 구비된 제 1 홀을 통해 각각의 탄소섬유바들이 끼워지도록 함으로써 탄소섬유바들간 일정간격 유지가 가능해지는 것을 특징으로 하는 다관절 로봇암. |
| 1 | 제 3항에 있어서,상기 스페이서 위치 고정 수단은 상기 스페이서에 탄소섬유바의 길이방향에 대한 수직방향으로 형성되면서 인접하는 제 1 홀(221, 221)과 연통되도록 제 2 홀(212a, 222a)을 구비하고, 상기 제 2 홀을 통해 볼트(212b, 222b) 등을 결합하면 상기 볼트의 일단면이 상기 제 1 홀에 결합된 탄소섬유바의 외측면에 밀착되도록 함을 특징으로 하는 다관절 로봇암. |
| 1 | 제 1항에 있어서,상기 탄소섬유바는 다각 형태인 것을 특징으로 하는 다관절 로봇암. |
| 1 | 제 1항에 있어서,상기 제 1 탄소섬유바 플랜지(310)는 전체적으로 원통형상으로, 타측이 상기 다발의 탄소섬유바의 일측으로 결합될 수 있는 구조로 이루어지고, 탄소섬유바 개수만큼의 홀(311)이 탄소섬유바 길이방향으로 구비되며, 일측이 제 1 로봇 몸체 플랜지(410)의 타측과 연결될 수 있도록 개방된 구조를 가지고;상기 제 1 로봇 몸체 연결부(510)는 전체적으로 원통형상으로, 타측이 상기 제 1 탄소섬유바 플랜지(310)의 일측으로 결합될 수 있는 구조로 이루어지고, 상기 탄소섬유바 개수만큼의 홀(511)이 탄소섬유바 길이방향으로 구비되며, 일측이 개방된 구조를 가지면서 로봇 몸체와 연결되며; 상기 제 1 결합구(610)는 상기 제 1 탄소섬유바 플랜지(310) 및 상기 제 1 로봇 몸체 연결부(510)에 구비된 홀(511, 311) 개수만큼의 볼트로 이루어지고, 각각의 볼트가 상기 제 1 로봇 몸체 연결부(510)와 제 1 탄소섬유바 플랜지(310)에 구비된 홀(311)을 통해 결합되어 각각의 상기 탄소 섬유 바의 내측으로 결합되며;상기 제 2 탄소섬유바 플랜지(320)는 전체적으로 원통형상으로, 일측이 상기 다발의 탄소섬유바의 타측으로 결합될 수 있는 구조로 이루어지고, 탄소섬유바 개수만큼의 홀(321)이 탄소섬유바 길이방향으로 구비되며, 타측이 제 1 로봇 핸드부 플랜지(420)의 일측과 연결될 수 있도록 개방된 구조를 가지고;상기 제 1 로봇 핸드부 플랜지(420)는 전체적으로 원통형상으로, 일측이 상기 제 2 탄소섬유바 플랜지(320)의 타측으로 결합될 수 있는 구조로 이루어지고, 상기 탄소섬유바 개수만큼의 홀(421)이 탄소섬유바 길이방향으로 구비되며, 타측이 개방된 구조를 가지면서 로봇 핸드부와 연결되며; 상기 제 2 결합구(620)는 상기 제 2 탄소섬유바 플랜지(320) 및 상기 제 1 로봇 핸드부 플랜지(420)에 구비된 홀(321, 421) 개수만큼의 볼트로 이루어지고, 각각의 볼트가 상기 제 2 탄소섬유바 플랜지(320) 및 상기 제 1 로봇 핸드부 플랜지(420)에 구비된 홀(321, 421)을 통해 결합되어 각각의 상기 탄소 섬유 바의 내측으로 결합되는 것을 특징으로 하는 다관절 로봇암. |
| 1 | 제 7항에 있어서,상기 제 1 로봇 몸체 연결부(510)와 제 1 탄소섬유바 플랜지(310) 사이에 위치하고, 전체적으로 원통형상이며, 탄소섬유바 개수만큼의 홀이 탄소섬유바 길이방향으로 구비되는 제 1 로봇 몸체 플랜지(410)를 더 포함함을 특징으로 하는 다관절 로봇암. |
| 1 | 제 1항 내지 8항 중 어느 한 항에 있어서, 상기 탄소 섬유 바(110)는,대나무에 열을 가해 탄소분말가루를 추출하고, 상기 추출된 탄소분말가루와 접착제를 포함시켜 얇은 필름을 제조하며, 상기 제조된 얇은 필름을 파이프에 감아 열처리 및 연마가공한 후 상기 파이프를 제거시킴으로써 제작할 수 있음을 특징으로 하는 다관절 로봇암. |
| 1 | 로봇 몸체와 로봇 핸드부 사이에 위치하는 다관절 로봇암에 있어서,상기 다관절 로봇암은, 내부가 중공이고 길이방향으로 길며 양측이 개방된 탄소 섬유 바(120 ~ 160)를 다수개 형성시키되, 상기 다수개의 탄소섬유바의 직경을 각각 달리하여 큰 직경의 탄소섬유바 내에 작은 직경의 탄소섬유바가 위치하도록 하고;상기 다수의 탄소섬유바의 양단에 결합되어 다수의 탄소섬유바간 일정한 간격을 유지하도록 위치 고정시키는 제 3,4 탄소섬유바 플랜지(330, 340);상기 제 3 탄소섬유바 플랜지(330)와 제 4 탄소섬유바 플랜지(340) 사이에 위치하여 서로 다른 직경을 가진 다수의 탄소섬유바간 일정간격을 유지하기 위한 스페이서;타측이 상기 제 3 탄소섬유바 플랜지(330)의 일측으로 결합되고, 일측이 로봇 몸체와 연결되는 제 2 로봇 몸체 연결부(530);상기 탄소섬유바 일측에 위치하는 제 2 로봇 몸체 연결부와(530) 제 3 탄소섬유바 플랜지(330)가 상기 탄소섬유바 일측으로 결합하기 위한 수단인 제 3 결합구(630);일측이 상기 제 4 탄소섬유바 플랜지(340)의 타측으로 결합되고, 타측이 로봇 핸드부와 연결되는 제 2 로봇 핸드부 플랜지(440); 및상기 탄소섬유바 타측에 위치하는 제 2 로봇 핸드부 플랜지(440)와 제 4 탄소섬유바 플랜지(340)가 상기 탄소섬유바 타측으로 결합하기 위한 수단인 제 4 결합구(640);를 포함함을 특징으로 하는 다관절 로봇암. |
| 1 | 제 10항에 있어서,상기 제 3 탄소섬유바 플랜지(330)는 전체적으로 원통형상으로, 타측이 상기 탄소섬유바의 일측으로 결합될 수 있도록 타측면에는 탄소섬유바의 일측면과 결합하기 위한 홈(331 ; 제 1 결합홈)이 구비되고, 일측면에는 제 3 결합구(630)와 결합하기 위한 홈(332 ; 제 2 결합홈)이 구비되며; 상기 제 2 로봇 몸체 연결부(530)는 전체적으로 원통형상으로, 타측이 상기 제 3 탄소섬유바 플랜지의 일측으로 결합될 수 있는 구조로 이루어지고, 상기 제 3 탄소섬유바 플랜지(330)와 결합시 제 3 탄소섬유바 플랜지의 일측면에 구비된 홀(332 ; 제 2 결합홈)과 연통되도록 상기 제 3 결합구 개수만큼의 홀(531)이 구비되며, 일측이 개방된 구조를 가지면서 로봇 몸체와 연결되며; 상기 제 3 결합구(630)는 상기 제 3 탄소섬유바 플랜지(330)의 제 2 결합홈(332)과 상기 제 2 로봇 몸체 연결부(530)에 구비된 홀(531) 개수만큼의 볼트로 이루어지고, 각각의 볼트가 제 2 로봇 몸체 연결부(430)에 구비된 홀(431)을 통해 결합되어 제 3 탄소섬유바 플랜지(330)의 일측에 구비된 제 2 결합홈(332)에 결합되며;상기 제 4 탄소섬유바 플랜지(340)는 전체적으로 원통형상으로, 일측이 상기 탄소섬유바의 타측으로 결합될 수 있도록 일측면에는 탄소섬유바의 타측면과 결합하기 위한 홈(341 ; 제 3 결합홈)이 구비되고, 타측면에는 제 4 결합구와 결합하기 위한 홈(342 ; 제 4 결합홈)이 구비되며; 상기 제 2 로봇 핸드부 플랜지(440)는 전체적으로 원통형상으로, 일측이 상기 제 4 탄소섬유바 플랜지(340)의 타측으로 결합될 수 있는 구조로 이루어지고, 상기 제 4 결합구(640) 개수만큼의 홀(441)이 탄소섬유바 길이방향으로 구비되며, 타측이 개방된 구조를 가지면서 로봇 핸드부와 연결되며;상기 제 4 결합구(640)는 상기 제 4 탄소섬유바 플랜지(340)의 제 4 결합홈(342)과 상기 제 2 로봇 핸드부 플랜지(440)에 구비된 홀(441) 개수만큼의 볼트로 이루어지고, 각각의 볼트가 제 2 로봇 핸드부 플랜지(440)에 구비된 홀(441)을 통해 결합되어 제 4 탄소섬유바 플랜지(340)의 타측에 구비된 제 4 결합홈(342)에 결합되는 것을 특징으로 하는 다관절 로봇암. |
| 1 | 제 11항에 있어서,상기 제 2 로봇 몸체 연결부(530)와 제 3 탄소섬유바 플랜지(330) 사이에 위치하고, 전체적으로 원통형상이며, 제 2 로봇 몸체 연결부(430)에 구비된 홀(431) 개수만큼의 홀(431)이 탄소섬유바 길이방향으로 구비되는 제 2 로봇 몸체 플랜지(430)를 더 포함함을 특징으로 하는 다관절 로봇암. |
| 1 | 제 13항에 있어서,상기 제 2 로봇 몸체 연결부(530), 제 2 로봇 몸체 플랜지(430), 제 3 탄소섬유바 플랜지(330)가 탄소섬유바로부터 분리되지 않도록 하는 수단은 제 3 탄소섬유바 플랜지의 타측에 탄소섬유바 길이방향에 대한 수직방향으로 홀(333a)을 구비하고, 탄소섬유바의 일측에도 탄소섬유바 길이방향에 대한 수직방향으로 홀(121 ~ 124)을 구비하여 상기 두 홀이 연통되도록 탄소섬유바와 제 3 탄소섬유바 플랜지를 결합한 후, 볼트 등을 상기 홀에 끼워지도록 하는 것을 특징으로 하는 다관절 로봇암. |
| 1 | 제 11항 또는 제 12항에 있어서,상기 스페이서(230, 240)의 위치를 고정시키는 수단을 더 구비하고; 상기 스페이서는 전체적으로 원기둥 형상으로, 다양한 직경을 가진 탄소섬유바가 끼워질 수 있도록 탄소섬유바 길이방향으로 홀(121 ~ 124)이 구비되며, 상기 홀간 일정간격을 유지하기 위한 투명막이 구비되고,상기 스페이서의 위치를 고정시키는 수단은 상기 스페이서에 탄소섬유바 길이방향에 대한 수직방향으로 홀(231a, 241a)을 구비하고, 탄소섬유바에도 탄소섬유바 길이방향에 대한 수직방향으로 홀(122, 123)을 구비하여 상기 두 홀이 연통되도록 스페이서와 탄소섬유바를 결합한 후, 볼트(231b) 등을 상기 홀에 끼움으로써 상기 스페이서의 위치를 고정시키는 것을 특징으로 하는 다관절 로봇암. |
| 1 | 제 11항 또는 제 12항에 있어서,상기 탄소섬유바는 다각 형태인 것을 특징으로 하는 다관절 로봇암. |
| 1 | 제 11항 또는 제 12항에 있어서,상기 탄소 섬유 바(120 ~ 160)는,대나무에 열을 가해 탄소분말가루를 추출하고, 상기 추출된 탄소분말가루와 접착제를 포함시켜 얇은 필름을 제조하며, 상기 제조된 얇은 필름을 파이프에 감아 열처리 및 연마가공한 후 상기 파이프를 제거시킴으로써 제작할 수 있음을 특징으로 하는 다관절 로봇암. |