| 번호 | 청구항 |
|---|---|
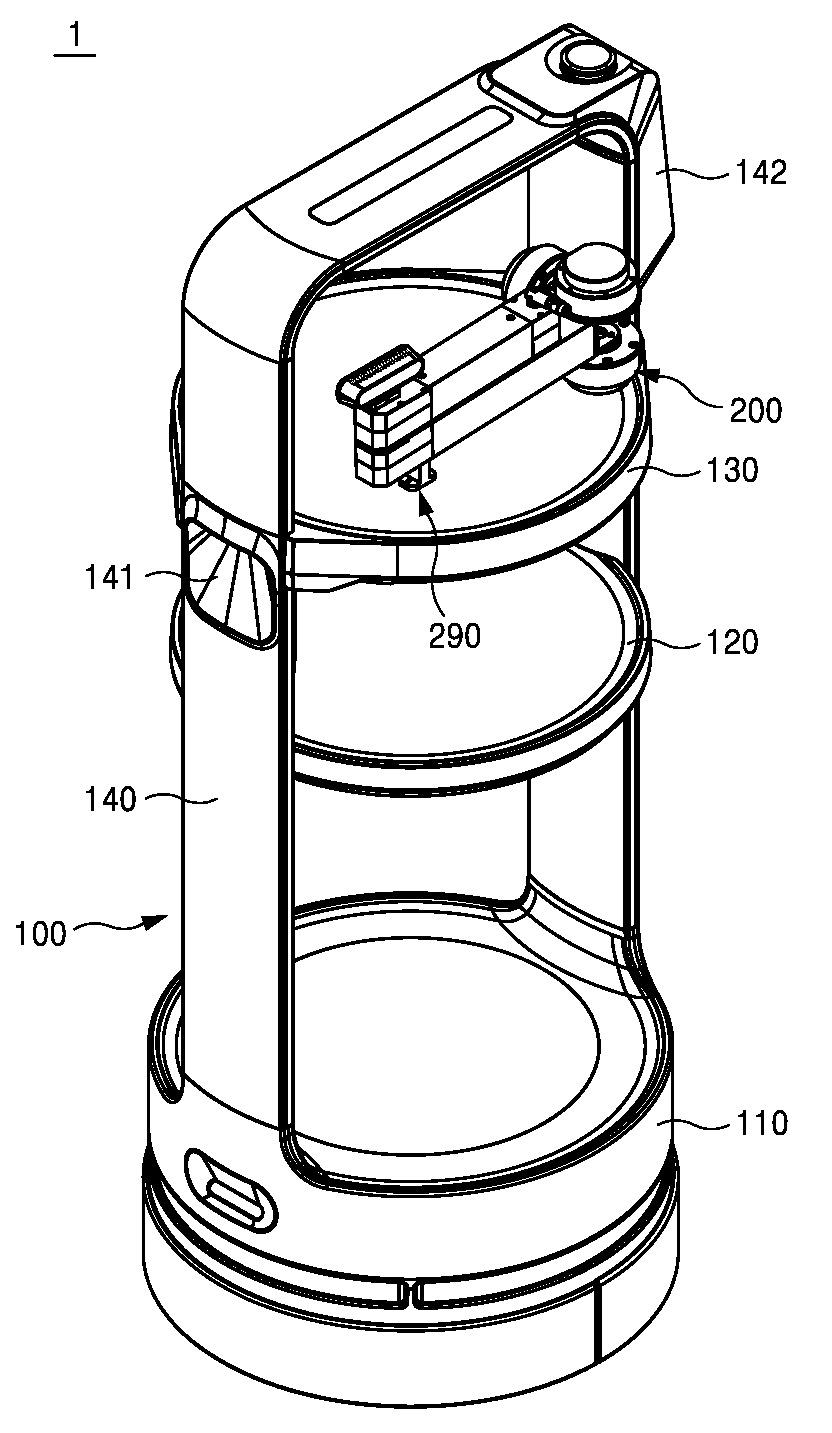
| 1 | 미리 세팅된 프로그램으로 목적지로 주행 가능한 무인 주행장치; 및상기 무인 주행장치의 일측에 탑재되며, 상기 무인 주행장치가 복층 건물 내에서 상기 목적지가 있는 층(floor)으로 주행 가능하도록 상기 복층 건물 내의 엘리베이터 버튼을 자동으로 조작하는 소형 로봇 암 장치(robot arm device)를 포함하며,상기 소형 로봇 암 장치는,상기 무인 주행장치의 일측에 착탈 가능하게 탑재되는 장치 탑재부;다(多) 방향으로 위치 이동 가능하게 구동하되 일측이 상기 장치 탑재부에 연결되는 복수 개의 암(arm);상기 암들의 일측에 결합하며, 상기 엘리베이터 버튼을 가압하는 푸싱 모듈(pushing module);상기 암들의 타측에 결합하며, 상기 푸싱 모듈이 푸싱할 상기 엘리베이터 버튼의 위치를 감지하는 리얼센스 유닛(realsense unit); 및상기 장치 탑재부와 상기 암들에 마련되며, 케이블 타입(cable type)으로 상기 암들을 구동시키는 케이블 타입 암 구동부를 포함하며, 상기 복수 개의 암은,일단부가 상기 장치 탑재부 측에 자유회전 가능하게 연결되는 메인 암; 및일단부는 상기 메인 암에 자유회전 가능하게 연결되고 타단부에 상기 푸싱 모듈이 결합하는 서브 암을 포함하며, 상기 케이블 타입 암 구동부는,상호 이격 배치되며, 상기 메인 암과 상기 서브 암을 개별적으로 또는 동기적으로 수평 구동시키기 위한 동력을 발생시키는 한 쌍의 암 수평 구동모터;상기 한 쌍의 암 수평 구동모터를 일체로 지지하는 모터 지지대; 상기 모터 지지대에 연결되며, 상기 한 쌍의 암 수평 구동모터을 포함해서 상기 메인 암과 상기 서브 암 전체를 회전 구동시키기 위한 동력을 발생시키는 암 회전 구동모터; 상기 한 쌍의 암 수평 구동모터 사이에 배치되되 상기 한 쌍의 암 수평 구동모터에 의해 회전하는 복수 개의 구동 풀리;상기 메인 암의 단부 영역에 상기 복수 개의 구동 풀리와 대응하게 마련되는 복수 개의 제1 종동 풀리;상기 복수 개의 구동 풀리와 상기 복수 개의 제1 종동 풀리를 개별적으로 각각 연결하는 복수 개의 제1 케이블;상기 서브 암의 일측 단부 영역에 상기 제1 종동 풀리와 축(shaft) 결합하는 제2 종동 풀리;상기 서브 암의 타측 단부 영역에 상기 제2 종동 풀리와 대응하게 마련되는 제3 종동 풀리; 상기 제2 종동 풀리와 상기 제3 종동 풀리를 연결하는 제2 케이블; 상기 제1 종동 풀리와 상기 제2 종동 풀리에 연결되며, 양단부 영역이 상기 메인 암과 상기 서브 암의 외측으로 노출되는 제1 풀리 샤프트;상기 제3 종동 풀리에 축(shaft) 결합하는 제2 풀리 샤프트;상기 제1 케이블에 접촉지지되고 상기 제1 케이블의 장력을 유지시키는 제1 장력 유지부; 및상기 제2 케이블에 접촉지지되고 상기 제2 케이블의 장력을 유지시키는 제2 장력 유지부를 포함하며,상기 푸싱 모듈이 상기 제2 풀리 샤프트에 착탈 가능하게 결합하는 딜리버리 로봇. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 삭제 |
| 5 | 삭제 |
| 6 | 제1항에 있어서,상기 제1 풀리 샤프트와 상기 제2 풀리 샤프트의 단부 영역은 비원형 단면 단부를 각각 형성하며,상기 리얼센스 유닛이 상기 제1 풀리 샤프트의 비원형 단면 단부에 착탈 가능하게 결합하며,상기 푸싱 모듈이 상기 제2 풀리 샤프트의 비원형 단면 단부에 착탈 가능하게 결합하는 딜리버리 로봇. |
| 7 | 제6항에 있어서,상기 리얼센스 유닛은,상기 제1 풀리 샤프트의 상기 비원형 단면 단부에 결합하는 유닛 브래킷; 및상기 유닛 브래킷에 연결되며, 3차원 공간 그 자체를 인지하는 한편 깊이감을 센싱하기 위해 3D 촬영 가능한 리얼센스를 포함하는 딜리버리 로봇. |
| 8 | 제6항에 있어서,상기 푸싱 모듈은,상기 제2 풀리 샤프트의 비원형 단면 단부에 착탈 가능하게 결합하는 모듈 하우징;상기 엘리베이터 버튼을 가압하되 탄성체로 마련되는 푸셔; 및상기 모듈 하우징과 상기 푸셔를 연결하는 연결부를 포함하는 딜리버리 로봇. |
| 9 | 제1항에 있어서,상기 무인 주행장치는,하단부에 회전 가능한 복수 개의 주행 휠이 마련되는 장치 본체;상기 장치 본체의 상부 영역에 마련되며, 운반 대상물이 안착되는 적어도 하나의 운반 대상물 안착용 선반; 및상기 운반 대상물 안착용 선반의 상부 영역에 배치되며, 상기 소형 로봇 암 장치가 탑재되는 장치 탑재용 선반을 포함하는 딜리버리 로봇. |
| 10 | 제9항에 있어서,상기 무인 주행장치는 상기 운반 대상물 안착용 선반과 상기 장치 탑재용 선반을 지지하는 한편 상기 운반 대상물 안착용 선반과 상기 장치 탑재용 선반을 둘러싸면서 상기 장치 본체와 연결되는 선반 지지대를 더 포함하며,상기 선반 지지대에는 한 쌍의 손잡이 홈이 형성되며,상기 장치 본체에는 구동 서스펜션이 마련되는 딜리버리 로봇. |
| 11 | 제9항에 있어서,상기 장치 탑재용 선반에는 상기 암이 파킹(parking)하는 암 파킹유닛이 마련되는 딜리버리 로봇. |
| 12 | 제11항에 있어서,상기 암 파킹유닛은,유닛 바디;상기 유닛 바디의 하단부에 형성되고 상기 장치 탑재용 선반에 나사 결합하는 베이스;상기 유닛 바디의 상단부에 형성되되 상기 암의 하단부 일측이 파킹하는 파킹부; 및상기 파킹부의 일측에 형성되고 상기 암의 이탈을 저지시키는 이탈 저지부를 포함하는 딜리버리 로봇. |
| 13 | 제1항에 있어서,상기 복층 건물 내에서 운반 대상물을 운반하기 위해 상기 무인 주행장치와 상기 소형 로봇 암 장치의 동작을 컨트롤하는 컨트롤러를 더 포함하는 딜리버리 로봇. |