| 번호 | 청구항 |
|---|---|
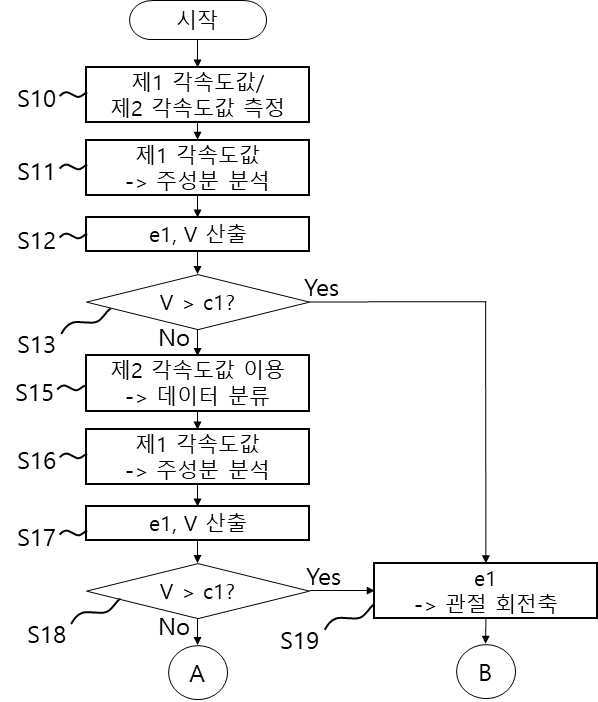
| 1 | 신체의 근위부와 말단부 간의 관절 회전축 예측 방법으로, 제1 관성 센서, 제2 관성 센서, 관절축 예측 모듈을 포함하는 관절 각도 측정 장치에 의해 수행되는 관절 회전축 예측 방법에 있어서,(a) 상기 말단부에 설치된 상기 제1 관성 센서로부터 제1 각속도값이 측정되는 단계와;(b) 상기 근위부에 설치된 상기 제2 관성 센서로부터 제2 각속도값이 측정되는 단계와;(c) 상기 관절축 예측 모듈에 의해 상기 제1 각속도값에 대해 주성분 분석(Principal component analysis)이 수행되어, 설명된 분산(Explained variance)과 첫 번째 고유벡터(Eigen vector)가 산출되는 단계와;(d) 상기 관절축 예측 모듈에 의해 상기 (c) 단계에서 산출된 상기 설명된 분산(Explained variance)이 기 설정된 기준 분산을 초과하는 경우, 상기 (c) 단계에서 산출된 상기 첫 번째 고유벡터(Eigen vector)가 상기 근위부와 상기 말단부 간의 관절 회전축으로 예측되는 단계를 포함하는 것을 특징으로 하는 신체의 근위부와 말단부 간의 관절 회전축 예측 방법. |
| 2 | 제1항에 있어서,상기 관절 각도 측정 장치느 데이터 분류 모듈을 더 포함하고,(e) 상기 데이터 분류 모듈에 의해 상기 설명된 분산(Explained variance)이 상기 기준 분산 이하인 경우, 상기 제2 각속도값에 기초하여, 상기 제1 각속도값 중 상기 근위부의 회전에 독립적인 제1 각속도값을 분류하는 단계와; (f) 상기 관절축 예측 모듈에 의해 상기 (e) 단계를 통해 분류된 상기 제1 각속도값에 대해 주성분 분석(Principal component analysis)이 수행되어, 설명된 분산(Explained variance)과 첫 번째 고유벡터(Eigen vector)가 산출되는 단계와;(g) 상기 관절축 예측 모듈에 의해 상기 (f) 단계에서 산출된 상기 설명된 분산(Explained variance)이 상기 기준 분산을 초과하는 경우, 상기 (f) 단계에서 산출된 상기 첫 번째 고유벡터(Eigen vector)가 상기 관절 회전축으로 예측되는 단계를 더 포함하는 것을 특징으로 하는 신체의 근위부와 말단부 간의 관절 회전축 예측 방법. |
| 3 | 제2항에 있어서,상기 (e) 단계는(e1) 상기 제2 각속도값의 놈(Norm) 값이 산출되는 단계와;(e2) 상기 (e1) 단계에서 산출된 상기 놈(Norm) 값이 기 설정된 기준 놈(Norm) 값보다 작은 경우, 상기 근위부의 회전에 독립적인 제1 각속도값로 분류되는 단계를 포함하는 것을 특징으로 하는 신체의 근위부와 말단부 간의 관절 회전축 예측 방법. |
| 4 | 제2항에 있어서,(h) 상기 데이터 분류 모듈에 의해 상기 (f) 단계에서 산출된 상기 설명된 분산(Explained variance)이 상기 기준 분산 이하인 경우, 상기 (e) 단계에서 분류된 상기 제1 각속도값을 제1 각속도 그룹과 제2 각속도 그룹으로 재분류하는 단계와;(i) 상기 관절축 예측 모듈에 의해 상기 제1 각속도 그룹과 상기 제2 각속도 그룹 각각에 대해 주성분 분석(Principal component analysis)이 수행되어, 상기 제1 각속도 그룹과 상기 제2 각속도 그룹 각각에 대한 설명된 분산(Explained variance)과 첫 번째 고유벡터(Eigen vector)가 산출되는 단계와;(j) 상기 관절축 예측 모듈에 의해 상기 제1 각속도 그룹과 상기 제2 각속도 그룹의 설명된 분산(Explained variance)에 기초하여, 상기 제1 각속도 그룹과 상기 제1 각속도 그룹의 첫 번째 고유벡터(Eigen vector) 중 어느 하나가 상기 관절 회전축으로 예측되는 단계를 포함하는 것을 특징으로 하는 신체의 근위부와 말단부 간의 관절 회전축 예측 방법. |
| 5 | 제4항에 있어서,상기 (h) 단계에서는 상기 (e) 단계에서 분류된 상기 제1 각속도값이 가우시안 혼합 모델(Gaussian mixture model)에 적용되어, 상기 제1 각속도 그룹과 상기 제2 각속도 그룹으로 분류되는 것을 특징으로 하는 신체의 근위부와 말단부 간의 관절 회전축 예측 방법. |
| 6 | 제4항에 있어서,상기 (j) 단계에서는 상기 제1 각속도 그룹과 상기 제2 각속도 그룹의 설명된 분산(Explained variance) 중 큰 값을 갖는 어느 하나의 첫 번째 고유벡터(Eigen vector)가 상기 관절 회전축으로 예측되는 단계를 포함하는 것을 특징으로 하는 신체의 근위부와 말단부 간의 관절 회전축 예측 방법. |