| 번호 | 청구항 |
|---|---|
| 5 | 제 4 항에 있어서,딥러닝 모델은 단일 단계 방식 알고리즘을 사용하는 딥러닝 모델인 상대적 거리 예측을 이용한 접촉 감지 장치. |
| 6 | 제 4 항에 있어서,딥러닝 모델은 이단계 방식 알고리즘을 사용하는 딥러닝 모델인 상대적 거리 예측을 이용한 접촉 감지 장치. |
| 1 | 프로세서; 및상기 프로세서와 연결되고 상기 프로세서에 의해 실행 가능한 프로그램 명령어들을 포함하는 메모리;를 포함하고, 상기 명령어들이 상기 프로세서에서 실행되어 상기 프로세서가 수행하는 동작은 :카메라에 의해 촬영된 깊이 정보가 포함되어 있지 않은 2차원 영상에서 적어도 둘 이상의 객체를 검출하여 객체의 명칭과 객체의 좌표 정보를 출력하는 객체 검출 동작과,검출된 객체 각각에 대하여 정의된 객체 표준 크기 정보를 참조하여 객체의 표준 크기 정보를 획득하는 표준 크기 획득 동작과,검출된 객체 각각의 좌표 정보로부터 영상 내에서의 객체의 크기 정보를 산출하는 크기 정보 산출 동작과,검출된 객체 각각에 대하여 객체의 표준 크기 정보와 영상 내에서의 객체의 크기 정보의 비율에 기초한 하기 수학식을 이용하여 카메라와 객체간의 상대적 거리를 산출하는 상대적 거리 산출 동작과,검출된 객체에서 선택된 두 객체에 대한 각각의 상대적 거리에 기초하여 상대적 거리의 유사도를 산출하는 유사도 산출 동작과,두 객체에 대하여 산출된 상대적 거리의 유사도와 정의된 접촉 감도를 비교하여 두 객체의 접촉 여부를 판단하는 접촉 감지 판단 동작을 포함하는 상대적 거리 예측을 이용한 접촉 감지 장치.[수학식](여기서, Distance는 상대적 거리, ObjectSizeX는 객체의 가로 크기, ObjectSizeY는 객체의 세로 크기, RealSizeX는 객체의 표준 가로 크기, RealSizeY는 객체의 표준 세로 크기이다.) |
| 2 | 제 1 항에 있어서, 접촉 감도는 카메라와 객체 간의 거리와, 카메라 렌즈에 따라 발생되는 왜곡을 반영하여 보정되는 상대적 거리 예측을 이용한 접촉 감지 장치. |
| 3 | 제 1 항에 있어서, 접촉으로 판단된 두 객체에 대한 경계상자의 색을 접촉되지 않는 객체의 경계상자의 색과 구분하여 표시하는 접촉 표시 동작을 더 포함하는 상대적 거리 예측을 이용한 접촉 감지 장치. |
| 4 | 제 1 항에 있어서, 객체 검출 동작은 딥러닝 모델을 이용하여 영상에서 객체를 검출하는 상대적 거리 예측을 이용한 접촉 감지 장치. |
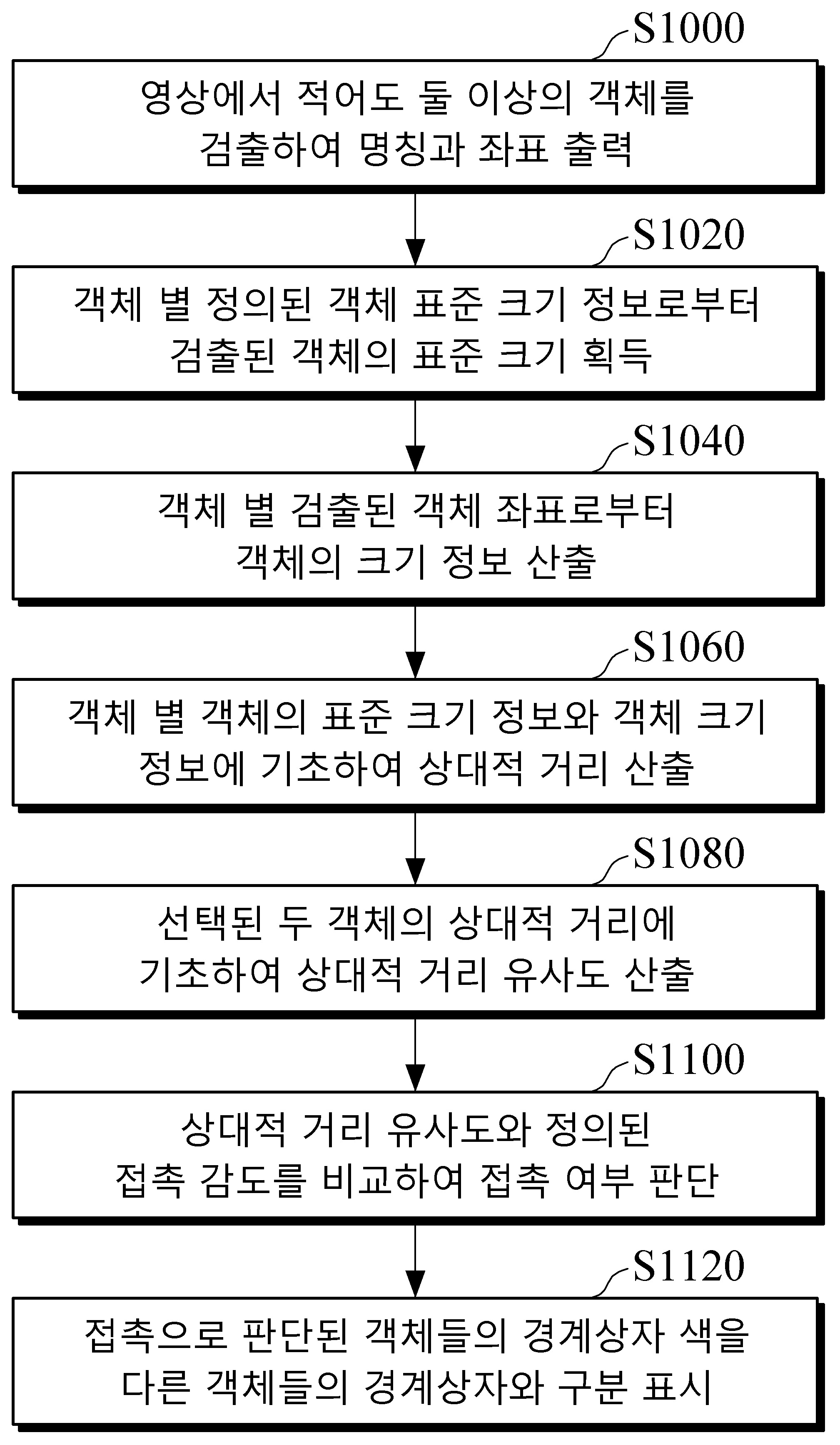
| 7 | 카메라에 의해 촬영된 깊이 정보가 포함되어 있지 않은 2차원 영상에서 적어도 둘 이상의 객체를 검출하여 객체의 명칭과 객체의 좌표 정보를 출력하는 객체 검출 단계;검출된 객체 각각에 대하여 정의된 객체 표준 크기 정보를 참조하여 객체의 표준 크기 정보를 획득하는 표준 크기 획득 단계;검출된 객체 각각의 좌표 정보로부터 영상 내에서의 객체의 크기 정보를 산출하는 크기 정보 산출 단계;검출된 객체 각각에 대하여 객체의 표준 크기 정보와 영상 내에서의 객체의 크기 정보의 비율에 기초한 하기 수학식을 카메라와 객체간의 상대적 거리를 산출하는 상대적 거리 산출 단계;검출된 객체에서 선택된 두 객체에 대한 각각의 상대적 거리에 기초하여 상대적 거리의 유사도를 산출하는 유사도 산출 단계;두 객체에 대하여 산출된 상대적 거리의 유사도와 정의된 접촉 감도를 비교하여 두 객체의 접촉 여부를 판단하는 접촉 감지 판단 단계;를 포함하는 상대적 거리 예측을 이용한 접촉 감지 방법.[수학식](여기서, Distance는 상대적 거리, ObjectSizeX는 객체의 가로 크기, ObjectSizeY는 객체의 세로 크기, RealSizeX는 객체의 표준 가로 크기, RealSizeY는 객체의 표준 세로 크기이다.) |
| 8 | 제 7 항에 있어서, 접촉 감도는 카메라와 객체 간의 거리와, 카메라 렌즈에 따라 발생되는 왜곡을 반영하여 보정되는 상대적 거리 예측을 이용한 접촉 감지 방법. |
| 9 | 제 7 항에 있어서, 접촉으로 판단된 두 객체에 대한 경계상자의 색을 접촉되지 않는 객체의 경계상자의 색과 구분하여 표시하는 접촉 표시 단계;를 더 포함하는 상대적 거리 예측을 이용한 접촉 감지 방법. |
| 10 | 제 7 항에 있어서, 객체 검출 단계는 딥러닝 모델을 이용하여 영상에서 객체를 검출하는 상대적 거리 예측을 이용한 접촉 감지 방법. |
| 11 | 제 10 항에 있어서,딥러닝 모델은 단일 단계 방식 알고리즘을 사용하는 딥러닝 모델인 상대적 거리 예측을 이용한 접촉 감지 방법. |
| 12 | 제 10 항에 있어서,딥러닝 모델은 이단계 방식 알고리즘을 사용하는 딥러닝 모델인 상대적 거리 예측을 이용한 접촉 감지 방법. |