| 번호 | 청구항 |
|---|---|
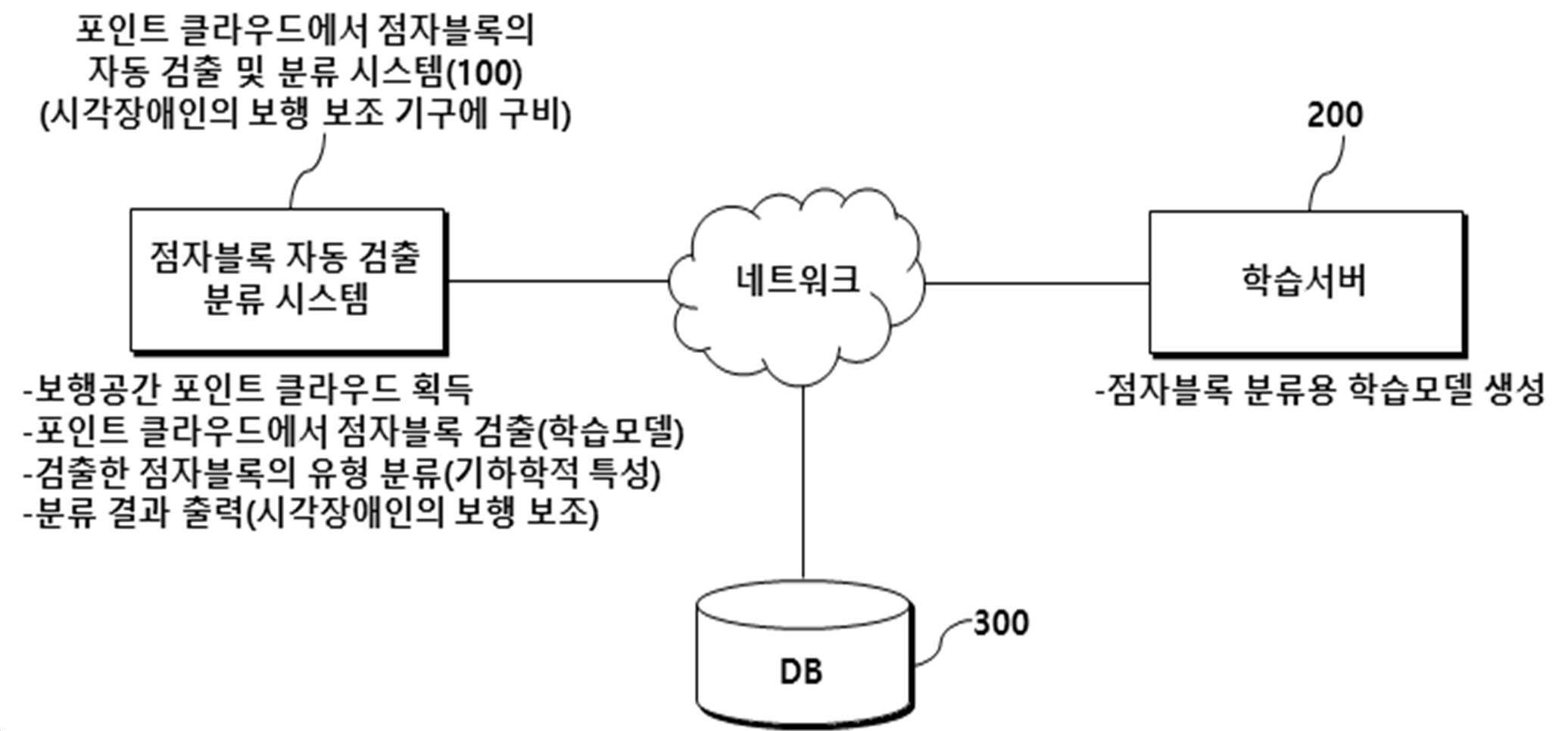
| 1 | 보행공간 포인트 클라우드를 획득하는 보행공간 포인트 클라우드 획득부;상기 획득한 보행공간 포인트 클라우드에서 점자블록을 검출하는 점자블록 검출부; 및점자블록의 기하학적 특성을 이용하여 상기 검출한 점자블록의 유형을 분류하는 점자블록 유형 분류부;를 포함하는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 시스템. |
| 2 | 청구항 1에 있어서,상기 점자블록 검출부는,상기 보행공간 포인트 클라우드에서 지면점 포인트 클라우드를 추출하는 지면점 포인트 클라우드 추출부; 및상기 추출한 지면점 포인트 클라우드를 점자블록 검출용 학습모델에 적용하여 점자블록 포인트 클라우드를 검출하는 점자블록 포인트 클라우드 검출부;를 포함하며,상기 점자블록 포인트 클라우드는 상기 검출한 점자블록인 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 시스템. |
| 3 | 청구항 2에 있어서,상기 지면점 포인트 클라우드는, CSF(cloth simulation filter) 기법을 활용하여 상기 보행공간 포인트 클라우드에서 지면점과 비지면점에 해당하는 포인트 클라우드를 각각 구분함으로써 추출되며,상기 점자블록 검출용 학습모델은, 점자블록을 포함하는 복수의 보행공간에 적어도 하나 이상의 서로 다른 조명환경을 적용하여 사전에 획득한 복수의 보행공간 포인트 클라우드에서 추출한 각 지면점 포인트 클라우드로 구성된 학습데이터를 학습하여 생성되며,상기 학습데이터를 구성하는 각 지면점 포인트 클라우드의 각 포인트는 점자블록 포인트 클라우드의 포인트인지 여부가 레이블링되어 있는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 시스템. |
| 4 | 청구항 1에 있어서,상기 점자블록 유형 분류부는,상기 검출한 점자블록에 해당하는 점자블록 포인트 클라우드에서 평면점 포인트 클라우드를 추출하는 평면점 포인트 클라우드 추출부;상기 추출한 평면점 포인트 클라우드에 대한 새로운 x축 및 y축을 포함하는 새로운 주축을 결정하여 상기 결정한 주축을 기준으로 상기 평면점 포인트 클라우드를 2차원 데이터로 변환하는 2차원 데이터 변환부;상기 변환한 2차원 데이터를 2차원 이진데이터로 변환하는 이진데이터 변환부; 및상기 x축의 방향으로 상기 2차원 이진데이터의 1/4영역에 대한 경계선을 추출하는 경계선 추출부;를 포함하며,상기 추출한 경계선에 대한 허프(hough)변환을 수행한 결과, 직선이 검출되면 상기 검출한 점자블록을 선형블록으로 분류하고, 직선이 검출되지 않으면 점형블록으로 분류하는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 시스템. |
| 5 | 청구항 4에 있어서,상기 평면점 포인트 클라우드 추출부는,상기 점자블록 포인트 클라우드에서 특정 범위의 z값을 가지는 복수의 포인트를 추출함으로써 상기 평면점 포인트 클라우드를 추출하는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 시스템. |
| 6 | 청구항 4에 있어서,상기 2차원 데이터 변환부는,상기 평면점 포인트 클라우드에 대한 주성분분석을 수행하여, 상기 평면점 포인트 클라우드를 구성하는 복수의 포인트에 대한 분산이 가장 큰 제1 주성분을 새로운 x축으로 결정하고, 상기 제1 주성분과 수직이면서 다음으로 분산이 큰 제2 주성분을 새로운 y축으로 결정하고,상기 새로운 x축과 y축으로 형성되는 평면에 상기 평면점 포인트 클라우드를 구성하는 복수의 포인트를 투영함으로써 상기 평면점 포인트 클라우드를 2차원 데이터로 변환하는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 시스템. |
| 7 | 보행공간 포인트 클라우드를 획득하는 보행공간 포인트 클라우드 획득 단계;상기 획득한 보행공간 포인트 클라우드에서 점자블록을 검출하는 점자블록 검출 단계; 및점자블록의 기하학적 특성을 이용하여 상기 검출한 점자블록의 유형을 분류하는 점자블록 유형 분류 단계;를 포함하는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 방법. |
| 8 | 청구항 7에 있어서,상기 점자블록 검출 단계는,상기 보행공간 포인트 클라우드에서 지면점 포인트 클라우드를 추출하는 지면점 포인트 클라우드 추출 단계; 및상기 추출한 지면점 포인트 클라우드를 점자블록 검출용 학습모델에 적용하여 점자블록 포인트 클라우드를 검출하는 점자블록 포인트 클라우드 검출 단계;를 포함하며,상기 점자블록 포인트 클라우드는 상기 검출한 점자블록이고,상기 지면점 포인트 클라우드는, CSF(cloth simulation filter) 기법을 활용하여 상기 보행공간 포인트 클라우드에서 지면점과 비지면점에 해당하는 포인트 클라우드를 각각 구분함으로써 추출되며,상기 점자블록 검출용 학습모델은, 점자블록을 포함하는 복수의 보행공간에 적어도 하나 이상의 서로 다른 조명환경을 적용하여 사전에 획득한 복수의 보행공간 포인트 클라우드에서 추출한 각 지면점 포인트 클라우드로 구성된 학습데이터를 학습하여 생성되며,상기 학습데이터를 구성하는 각 지면점 포인트 클라우드의 각 포인트는 점자블록 포인트 클라우드의 포인트인지 여부가 레이블링되어 있는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 방법. |
| 9 | 청구항 7에 있어서,상기 점자블록 유형 분류 단계는,상기 검출한 점자블록에 해당하는 점자블록 포인트 클라우드에서 평면점 포인트 클라우드를 추출하는 평면점 포인트 클라우드 추출 단계;상기 추출한 평면점 포인트 클라우드에 대한 새로운 x축 및 y축을 포함하는 새로운 주축을 결정하여 상기 결정한 주축을 기준으로 상기 평면점 포인트 클라우드를 2차원 데이터로 변환하는 2차원 데이터 변환 단계;상기 변환한 2차원 데이터를 2차원 이진데이터로 변환하는 이진데이터 변환 단계; 및상기 x축의 방향으로 상기 2차원 이진데이터의 1/4영역에 대한 경계선을 추출하는 경계선 추출 단계;를 포함하며,상기 추출한 경계선에 대한 허프(hough)변환을 수행한 결과, 직선이 검출되면 상기 검출한 점자블록을 선형블록으로 분류하고, 직선이 검출되지 않으면 점형블록으로 분류하는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 방법. |
| 10 | 청구항 9에 있어서,상기 평면점 포인트 클라우드 추출 단계는,상기 점자블록 포인트 클라우드에서 특정 범위의 z값을 가지는 복수의 포인트를 추출함으로써 상기 평면점 포인트 클라우드를 추출하며,상기 2차원 데이터 변환 단계는,상기 평면점 포인트 클라우드에 대한 주성분분석을 수행하여, 상기 평면점 포인트 클라우드를 구성하는 복수의 포인트에 대한 분산이 가장 큰 제1 주성분을 새로운 x축으로 결정하고, 상기 제1 주성분과 수직이면서 다음으로 분산이 큰 제2 주성분을 새로운 y축으로 결정하고, 상기 새로운 x축과 y축으로 형성되는 평면에 상기 평면점 포인트 클라우드를 구성하는 복수의 포인트를 투영함으로써 상기 평면점 포인트 클라우드를 2차원 데이터로 변환하는 것을 특징으로 하는 포인트 클라우드에서 점자블록을 자동으로 검출하고 분류하는 방법. |