| 번호 | 청구항 |
|---|---|
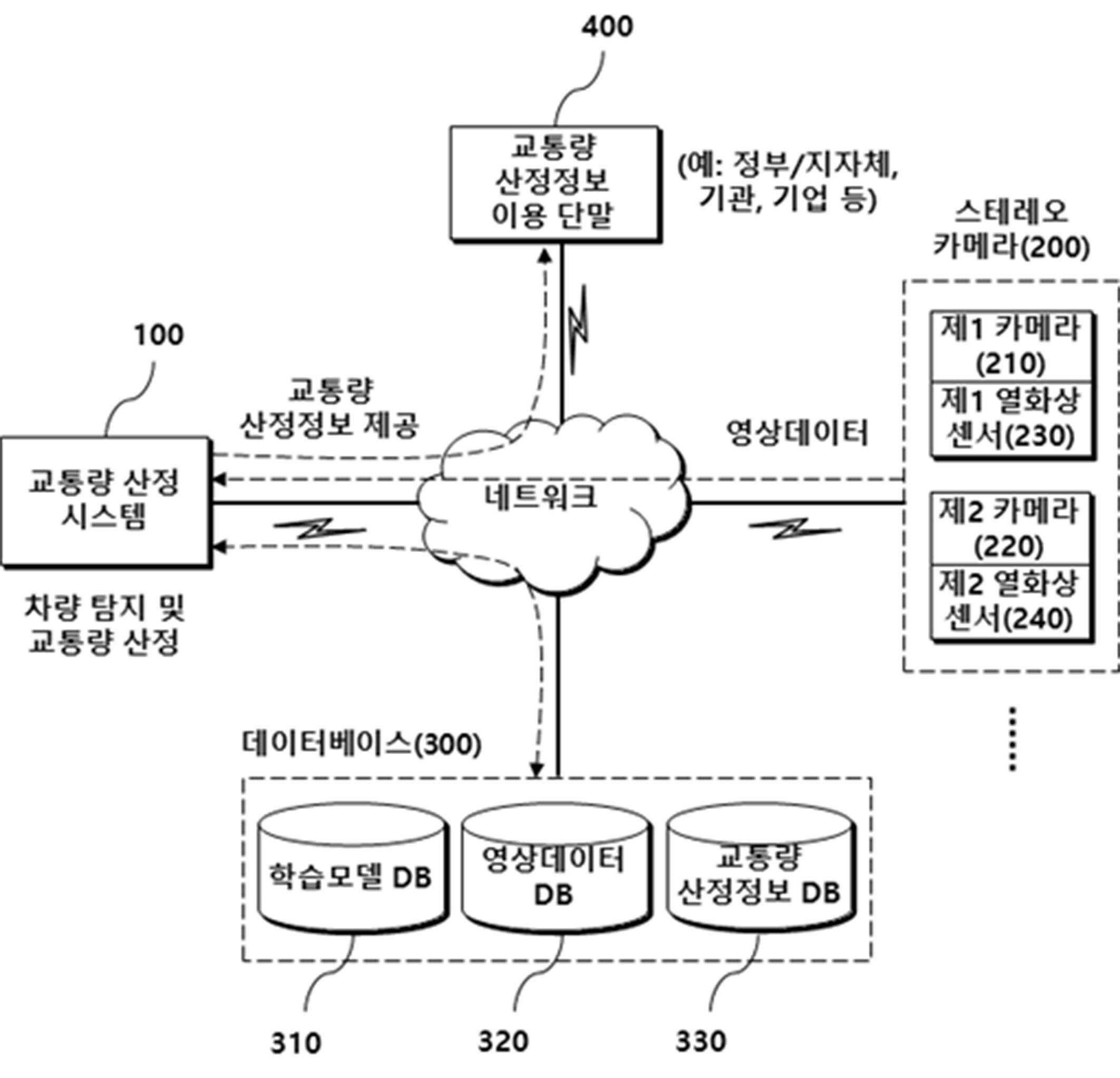
| 1 | 스테레오 카메라로 촬영한 좌영상 및 우영상에서 차량을 추정하는 차량 추정부;상기 좌영상 및 우영상에서 추정된 각 차량의 좌표를 통해서 상기 좌영상과 우영상간의 위치나 각도의 차이를 계산하여 부등각사상변환 파라미터를 결정하는 부등각사상변환 파라미터 결정부;상기 결정한 부등각사상변환 파라미터를 이용하여 상기 좌영상 및 우영상에서 추정하지 못한 차량을 추가로 탐지하는 차량 탐지부; 및상기 탐지한 결과를 이용하여 단위시간에 따른 교통량을 산정하는 교통량 산정부;를 포함하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 시스템. |
| 2 | 청구항 1에 있어서,상기 스테레오 카메라로 촬영한 좌영상 및 우영상은,광학영상, 열화상 또는 이들의 조합을 포함하며,상기 차량 탐지부는,상기 광학영상, 열화상 또는 이들의 조합을 통해서 차량이 겹쳐져 있는 사각지대나, 안개, 황사 및 비를 포함한 기상조건이나, 역광을 포함한 촬영환경에 따라 좌영상 또는 우영상에 추정하지 못한 차량을 추가로 탐지하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 시스템. |
| 3 | 청구항 1에 있어서,상기 교통량 산정 시스템은,다양한 종류의 차량을 촬영한 광학영상, 열화상 또는 이들의 조합으로부터 상기 차량을 학습하여 차량 추정용 학습모델을 생성하는 학습부;를 더 포함하며,상기 차량 추정부는,상기 스테레오 카메라에서 촬영한 광학영상, 열화상 또는 이들의 조합에 대한 좌영상 및 우영상을 상기 차량 추정용 학습모델에 각각 입력하여, 상기 좌영상 및 우영상에 포함된 차량에 대한 특징점을 추출하고, 상기 추출한 특징점을 연결하여 바운딩박스를 구성함으로써, 상기 좌영상 및 우영상에 존재하는 차량을 추정하는 것을 더 포함하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 시스템. |
| 4 | 청구항 1에 있어서,상기 차량 탐지부는,상기 좌영상(또는 우영상)에서 추정된 차량을 나타내는 바운딩박스의 좌표를 확인하고,상기 결정한 부등각사상변환 파라미터를 이용하여 상기 좌영상(또는 우영상)에서 추정된 차량을 나타내는 바운딩박스의 좌표와 대응하는 상기 우영상(또는 좌영상)의 좌표를 확인하고,상기 확인한 우영상(또는 좌영상)의 좌표에 상기 차량 추정부에서 추정한 차량을 나타내는 바운딩박스가 없는 경우 상기 우영상(또는 좌영상)의 좌표에 바운딩박스를 표시하여 차량이 위치한 것으로 결정하며,상기 좌영상 및 우영상에서 각각 추정한 차량의 수를 일치시킴으로써, 상기 좌영상 및 우영상에서 추정하지 못한 차량을 추가로 탐지하도록 하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 시스템. |
| 5 | 청구항 1에 있어서,상기 교통량 산정 시스템은,상기 교통량 산정부에서 산정한 특정 교통량 산정대상 영역에서의 단위시간에 따른 교통량 산정정보를 정부나 지방자치단체, 기관, 기업 또는 이들의 조합을 포함한 교통량 산정정보 이용 단말로 제공하는 교통량 산정정보 제공부;를 더 포함하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 시스템. |
| 6 | 교통량 산정 시스템에서, 스테레오 카메라로 촬영한 좌영상 및 우영상에서 차량을 추정하는 차량 추정 단계;상기 교통량 산정 시스템에서, 상기 좌영상 및 우영상에서 추정된 각 차량의 좌표를 통해서 상기 좌영상과 우영상간의 위치나 각도의 차이를 계산하여 부등각사상변환 파라미터를 결정하는 부등각사상변환 파라미터 결정 단계;상기 교통량 산정 시스템에서, 상기 결정한 부등각사상변환 파라미터를 이용하여 상기 좌영상 및 우영상에서 추정하지 못한 차량을 추가로 탐지하는 차량 탐지 단계; 및상기 교통량 산정 시스템에서, 상기 탐지한 결과를 이용하여 단위시간에 따른 교통량을 산정하는 교통량 산정 단계;를 포함하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 방법. |
| 7 | 청구항 6에 있어서,상기 스테레오 카메라로 촬영한 좌영상 및 우영상은,광학영상, 열화상 또는 이들의 조합을 포함하며,상기 차량 탐지 단계는,상기 광학영상, 열화상 또는 이들의 조합을 통해서 차량이 겹쳐져 있는 사각지대나, 안개, 황사 및 비를 포함한 기상조건이나, 역광을 포함한 촬영환경에 따라 좌영상 또는 우영상에 추정하지 못한 차량을 추가로 탐지하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 방법. |
| 8 | 청구항 6에 있어서,상기 교통량 산정 방법은,상기 교통량 산정 시스템에서, 다양한 종류의 차량을 촬영한 광학영상, 열화상 또는 이들의 조합으로부터 상기 차량을 학습하여 차량 추정용 학습모델을 생성하는 학습 단계;를 더 포함하며,상기 차량 추정 단계는,상기 교통량 산정 시스템에서, 상기 스테레오 카메라에서 촬영한 광학영상, 열화상 또는 이들의 조합에 대한 좌영상 및 우영상을 상기 차량 추정용 학습모델에 각각 입력하여, 상기 좌영상 및 우영상에 포함된 차량에 대한 특징점을 추출하고, 상기 추출한 특징점을 연결하여 바운딩박스를 구성함으로써, 상기 좌영상 및 우영상에 존재하는 차량을 추정하는 것을 더 포함하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 방법. |
| 9 | 청구항 6에 있어서,상기 차량 탐지 단계는,상기 교통량 산정 시스템에서, 상기 좌영상(또는 우영상)에서 추정된 차량을 나타내는 바운딩박스의 좌표를 확인하는 단계;상기 교통량 산정 시스템에서, 상기 결정한 부등각사상변환 파라미터를 이용하여 상기 좌영상(또는 우영상)에서 추정된 차량을 나타내는 바운딩박스의 좌표와 대응하는 상기 우영상(또는 좌영상)의 좌표를 확인하는 단계; 및상기 교통량 산정 시스템에서, 상기 확인한 우영상(또는 좌영상)의 좌표에 상기 차량 추정 단계에서 추정한 차량을 나타내는 바운딩박스가 없는 경우, 상기 우영상(또는 좌영상)의 좌표에 바운딩박스를 표시하여 차량이 위치한 것으로 결정하는 단계;를 더 포함하며,상기 교통량 산정 시스템에서, 상기 좌영상과 우영상에서 각각 추정한 차량의 수를 일치시킴으로써, 상기 좌영상과 우영상에서 추정하지 못한 차량을 추가로 탐지하도록 하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 방법. |
| 10 | 청구항 6에 있어서,상기 교통량 산정 방법은,상기 교통량 산정 시스템에서, 상기 교통량 산정 단계에서 산정한 특정 교통량 산정대상 영역에서의 단위시간에 따른 교통량 산정정보를 정부나 지방자치단체, 기관, 기업 또는 이들의 조합을 포함한 교통량 산정정보 이용 단말로 제공하는 교통량 산정정보 제공 단계;를 더 포함하는 것을 특징으로 하는 스테레오 영상과 딥러닝을 이용한 교통량 산정 방법. |