| 번호 | 청구항 |
|---|---|
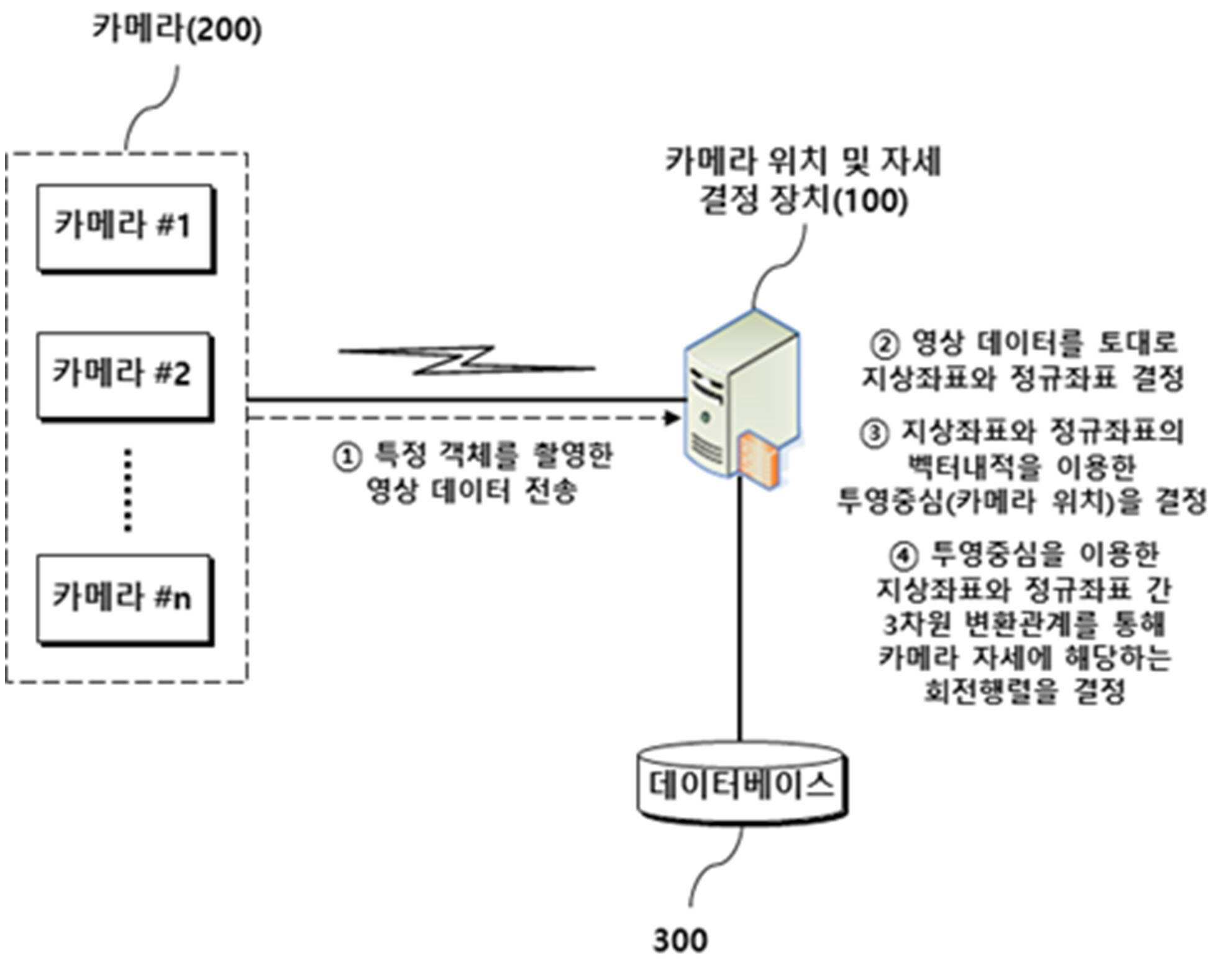
| 1 | 카메라로부터 특정 객체를 촬영한 영상 데이터를 입력받는 단계;상기 입력받은 영상 데이터를 토대로 3차원의 지상좌표를 결정하는 단계;상기 지상좌표에 대응되는 2차원의 정규좌표를 결정하는 단계;상기 지상좌표와 정규좌표의 벡터내적을 결정하는 단계;상기 결정한 백터내적을 이용하여 카메라 위치에 해당하는 투영중심을 결정하는 단계; 및상기 결정한 투영중심을 이용한 지상좌표와 정규좌표간의 3차원 변환관계를 통해 카메라의 자세에 해당하는 회전행렬을 결정하는 단계;를 포함하며,상기 회전행렬을 결정하는 단계는,상기 결정한 투영중심을 이용하여 상기 지상좌표와 상기 정규좌표 간의 축척계수를 결정하는 단계;상기 정규좌표에 상기 결정한 축척계수를 곱하여 축척이 고려된 정규좌표로 복원하는 단계;상기 복원한 축척이 고려된 정규좌표를 공선조건식에 적용하여 회전행렬을 미지수로 하는 3차원 관계식을 설정하는 단계; 및상기 설정한 회전행렬을 미지수로 하는 3차원 관계식에서, 대각합의 연산성질 및 특이값 분해를 이용하여 카메라의 자세에 해당하는 회전행렬을 결정하는 단계;를 포함하는 것을 특징으로 하는 벡터내적과 3차원 좌표변환을 이용한 카메라의 위치 및 자세를 결정하는 방법. |
| 2 | 청구항 1에 있어서,상기 방법은,상기 지상좌표와 상기 지상좌표에 대응되는 정규좌표를 이용하여 카메라의 위치와 자세에 해당하는 외부표정요소를 결정하기 위한 기하학적 제약조건을 구축하는 단계;를 더 포함하며,상기 기하학적 제약조건을 구축하는 단계는,상기 입력받은 영상 데이터에 대한 2개의 3차원 지상좌표와 상기 3차원 지상좌표가 상기 영상 데이터에 투영된 2개의 사진좌표를 설정하는 단계; 및상기 설정한 사진좌표를 왜곡이 보정된 정규좌표로 변환하여 상기 기하학적 제약조건을 구축하는 단계;를 포함하는 것을 특징으로 하는 벡터내적과 3차원 좌표변환을 이용한 카메라의 위치 및 자세를 결정하는 방법. |
| 3 | 청구항 1에 있어서,상기 투영중심을 결정하는 단계는,상기 결정한 벡터내적을 이용하여 상기 지상좌표와 상기 지상좌표에 대응되는 상기 정규좌표 간의 관측방정식을 구성하는 단계;상기 구성한 관측방정식의 상기 카메라의 위치 및 자세에 대하여 설정된 초기값을 확인하는 단계; 및상기 구성한 관측방정식을 상기 확인한 초기값을 이용하여 카메라에 대한 최적의 위치가 결정될 때까지 반복적으로 계산함으로써 카메라의 투영중심을 결정하는 단계;를 포함하는 것을 특징으로 하는 벡터내적과 3차원 좌표변환을 이용한 카메라의 위치 및 자세를 결정하는 방법. |
| 4 | 삭제 |
| 5 | 카메라로부터 특정 객체를 촬영한 영상 데이터를 입력받는 영상 입력부;상기 입력받은 영상 데이터를 토대로 3차원의 지상좌표와 상기 지상좌표에 대응되는 2차원의 정규좌표를 결정하는 좌표 결정부;상기 지상좌표와 상기 지상좌표의 벡터내적을 결정하고, 상기 결정한 벡터내적을 이용하여 카메라의 위치에 해당하는 투영중심을 결정하는 카메라 위치 결정부; 및상기 결정한 투영중심을 이용한 지상좌표와 정규좌표간의 3차원 변환관계를 통해 카메라의 자세에 해당하는 회전행렬을 결정하는 카메라 자세 결정부;를 포함하며,상기 카메라 자세 결정부는,상기 결정한 정규좌표에 상기 결정한 투영중심을 이용하여 축척계수 결정부에서 결정한 상기 지상좌표와 상기 정규좌표 간의 축척계수를 곱하여 축척이 고려된 정규좌표로 복원하고,상기 복원한 축척이 고려된 정규좌표를 공선조건식에 적용하여 회전행렬을 미지수로 하는 3차원 관계식을 설정하며,상기 설정한 회전행렬을 미지수로 하는 3차원 관계식에서, 대각합의 연산성질 및 특이값 분해를 이용하여 카메라의 자세에 해당하는 회전행렬을 결정하는 것을 더 포함하는 것을 특징으로 하는 벡터내적과 3차원 좌표변환을 이용한 카메라의 위치 및 자세를 결정하는 시스템. |
| 6 | 청구항 5에 있어서,상기 카메라 위치 결정부는,상기 결정한 벡터내적을 이용하여 상기 지상좌표와 상기 지상좌표에 대응되는 상기 정규좌표 간의 관측방정식을 구성하고,상기 구성한 관측방정식의 상기 카메라의 위치 및 자세에 대하여 설정된 초기값을 확인하며,상기 구성한 관측방정식을 상기 확인한 초기값을 이용하여 카메라에 대한 최적의 위치가 결정될 때까지 반복적으로 계산함으로써 카메라의 투영중심을 결정하는 것을 더 포함하는 것을 특징으로 하는 벡터내적과 3차원 좌표변환을 이용한 카메라의 위치 및 자세를 결정하는 시스템. |
| 7 | 삭제 |