| 번호 | 청구항 |
|---|---|
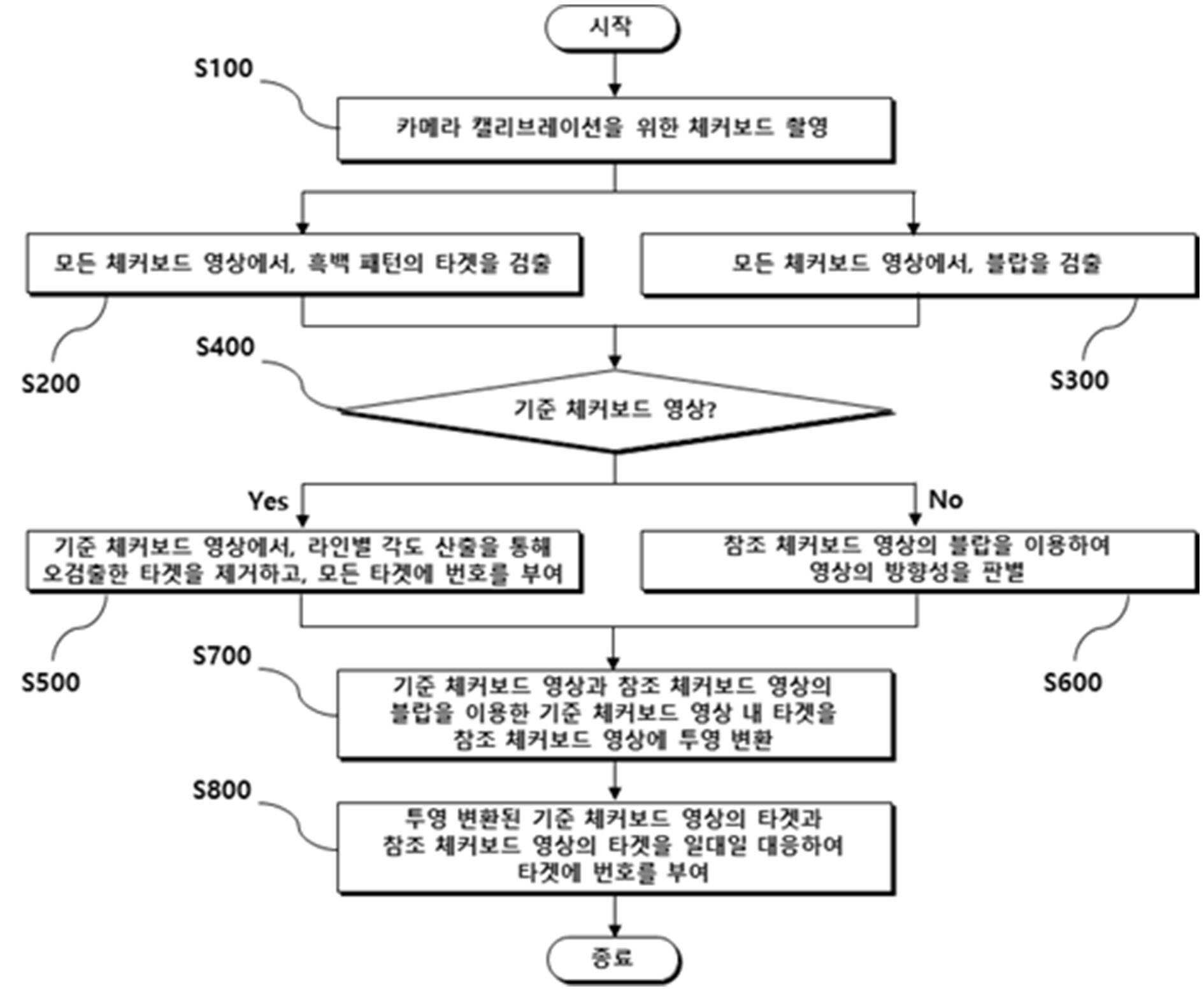
| 1 | 카메라 캘리브레이션을 위해 블랍이 구비된 체커보드를 카메라의 위치와 자세를 바꿔서 촬영한 복수의 체커보드 영상에서 복수의 타겟을 검출하는 타겟 검출 단계;상기 촬영한 체커보드 영상에서 블랍을 검출하는 블랍 검출 단계; 및상기 검출한 타겟과 블랍을 이용하여 자동으로 타겟을 인식하는 타겟 인식 단계;를 포함하며,상기 타겟 검출 단계는,상기 촬영한 체커보드 영상에서 특징점 연산자를 이용하여 특징점을 검출하는 단계; 및상기 검출한 특징점이 흑백 패턴, 컬러 패턴 또는 이들의 조합을 포함한 패턴의 왜곡 고려 조건, 경계선 횟수 조건 및 흑백의 픽셀 비율 조건을 모두 충족하면 해당 체커보드 영상의 특징점을 상기 패턴의 타겟으로 검출하는 단계;를 더 포함하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 방법. |
| 2 | 청구항 1에 있어서,상기 타겟 인식 단계는,상기 검출한 복수의 타겟 좌표를 통해서 상기 체커보드 영상이 기준 체커보드 영상인지 참조 체커보드 영상인지 판별하는 단계;상기 판별한 결과 기준 체커보드 영상이면, 상기 기준 체커보드 영상에 대해서 오검출한 타겟을 제거하는 단계;상기 판별한 결과 참조 체커보드 영상이면, 상기 참조 체커보드 영상에 대해서 상기 검출한 블랍으로부터 상기 참조 체커보드 영상의 방향성을 판별하는 단계;상기 기준 체커보드 영상의 블랍과 상기 참조 체커보드 영상의 블랍을 이용해서 기준 체커보드 영상을 참조 체커보드 영상에 맞게 투영 변환하는 단계; 및상기 투영 변환된 기준 체커보드 영상의 타겟과 참조 체커보드 영상의 타겟을 각각 일대일 대응시켜 타겟에 번호를 부여하는 단계;를 포함하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 방법. |
| 3 | 청구항 1에 있어서,상기 체커보드는, 흑백 패턴, 컬러 패턴 또는 이들의 조합을 포함한 패턴을 포함하고,상기 패턴의 타겟 인식을 위해 8개의 블랍이 구비되고,1번 내지 4번 블랍은 상기 체커보드 영상의 방향성 판별에 사용하고, 5번 내지 8번 블랍은 오검출되는 타겟을 제거하는데 사용하거나 타겟 개수를 산출하는데 사용하며,1번 내지 8번 블랍은 영상 간의 투영 변환을 위한 매개변수 결정에 사용하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 방법. |
| 4 | 삭제 |
| 5 | 청구항 1에 있어서,상기 블랍 검출 단계는,상기 촬영한 체커보드 영상에서 다각형을 검출하고, 꼭지점의 개수가 4개이면서 2개의 경계선이 이루는 각도가 90도±45도 이내인 다각형을 사각형으로 판별하고,상기 판별한 사각형 중 백색 사각형의 네 꼭지점에서 바깥 방향으로 블랍의 크기에 비례한 길이만큼 선분을 그린 후 밝기 값의 변화 횟수를 검사하여, 밝기 값 변화 횟수가 3회인 꼭지점이 3개 이상, 4개 이하이면 블랍을 포함하는 사각형으로 판별하고,상기 판별한 블랍을 포함하는 사각형 내에서 추출된 경계선을 이용하여 다각형을 검출한 후 꼭지점의 개수가 3개 이상이면서 각각의 벡터 간 각도가 최소 -80도 이하, 최대 0도 이하인 경우 원으로 가정하며,상기 원으로 가정한 다각형의 면적이 모든 블랍의 평균 면적의 70% 이상인 경우 상기 다각형을 블랍으로 검출하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 방법. |
| 6 | 청구항 2에 있어서,상기 오검출한 타겟을 제거하는 것은,상기 기준 체커보드 영상에서 가장자리 네 방향의 타겟 배열을 검출하고,상기 검출한 가장자리 네 방향의 타겟 배열을 이용하여 각 라인별 각도를 산출하며,상기 산출한 각 라인별 각도가 기 설정된 범위의 각도를 벗어나는 경우 해당 타겟을 오검출 타겟으로 분류하여 제거하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 방법. |
| 7 | 청구항 2에 있어서,상기 타겟에 번호를 부여하는 단계는,상기 투영 변환된 기준 체커보드 영상의 타겟과 참조 체커보드 영상의 타겟 간에 가까운 타겟 좌표를 탐색하여, 상기 기준 체커보드 영상의 타겟 번호와 동일하게 상기 참조 체커보드 영상의 타겟 번호를 부여하는 단계; 및상기 참조 체커보드 영상에서 타겟으로 검출되어야 하는 특징점 중 타겟으로 검출되지 않은 특징점이 발생하는 경우, 타겟 번호가 부여되지 않은 특징점의 타겟 번호를 부여하는 단계;를 더 포함하며,상기 타겟 번호를 부여하는 것은, 좌상단 타겟부터 시작하고, 상기 좌상단 타겟으로부터 가까운 두 타겟 중에서 상단에 있는 타겟을 다음 번호로 선정하고, 우하단 타겟의 번호가 선정될 때까지 수행하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 방법. |
| 8 | 흑백 패턴, 컬러 패턴 또는 이들의 조합을 포함한 패턴을 반복하여 나타내는 체스보드 또는 소정의 패턴을 포함하는 보드를 포함하는 체커보드; 및상기 체커보드의 소정 위치에 부착되어, 상기 체커보드의 영상 내에서 타겟을 자동으로 인식하기 위한 블랍;을 포함하며,상기 블랍은,카메라 캘리브레이션을 위해 촬영한 영상에서 사각형을 인식하기 위한 테두리의 사각형 내부에 원으로 구성되며,상기 카메라 캘리브레이션을 위해 촬영한 영상에서 상기 체커보드의 방향성을 판별하기 위한 방향성 판별용 블랍; 및상기 카메라 캘리브레이션을 위해 촬영한 영상에서 상기 체커보드의 오인식 타겟 제거 및 타겟 개수를 산출하기 위한 타겟 개수 산출용 블랍;을 포함하는 것을 특징으로 하는 카메라 캘리브레이션을 위한 체커보드. |
| 9 | 삭제 |
| 10 | 청구항 8에 있어서,상기 블랍은,상기 체커보드에 8개를 부착하여 구성하는 경우,1번 내지 4번 블랍은 상기 방향성 판별용 블랍으로 사용하고,5번 내지 8번 블랍은 상기 타겟 개수 산출용 블랍으로 사용하는 것을 특징으로 하는 카메라 캘리브레이션을 위한 체커보드. |
| 11 | 카메라 캘리브레이션을 위해 블랍이 구비된 체커보드를 카메라의 위치와 자세를 바꿔서 촬영한 복수의 체커보드 영상에서 복수의 타겟을 검출하는 타겟 검출부;상기 촬영한 체커보드 영상에서 블랍을 검출하는 블랍 검출부; 및상기 검출한 타겟과 블랍을 이용하여 자동으로 타겟을 인식하는 자동 타겟 인식부;를 포함하며,상기 타겟 검출부는,상기 촬영한 체커보드 영상에서 특징점 연산자를 이용하여 특징점을 검출하고, 상기 검출한 특징점이 흑백 패턴, 컬러 패턴 또는 이들의 조합을 포함한 패턴의 왜곡 고려 조건, 경계선 횟수 조건 및 흑백의 픽셀 비율 조건을 모두 충족하면 해당 체커보드 영상의 특징점을 상기 패턴의 타겟으로 검출하는 것을 더 포함하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 장치. |
| 12 | 청구항 11에 있어서,상기 자동 타겟 인식부는,상기 검출한 복수의 타겟 좌표를 통해서 상기 체커보드 영상이 기준 체커보드 영상인지 참조 체커보드 영상인지 판별하는 기준 체커보드 판별부;상기 판별한 결과 기준 체커보드 영상이면, 상기 기준 체커보드 영상에 대해서 오검출한 타겟을 제거하는 오검출 타겟 제거부;상기 판별한 결과 참조 체커보드 영상이면, 상기 참조 체커보드 영상에 대해서 상기 검출한 블랍으로부터 상기 참조 체커보드 영상의 방향성을 판별하는 방향성 판별부;상기 기준 체커보드 영상의 블랍과 상기 참조 체커보드 영상의 블랍을 이용해서 기준 체커보드 영상을 참조 체커보드 영상에 맞게 투영 변환하는 투영변환부; 및상기 투영 변환된 기준 체커보드 영상의 타겟과 참조 체커보드 영상의 타겟을 각각 일대일 대응시켜 타겟에 번호를 부여하는 타겟 대응부;를 포함하는 것을 특징으로 하는 체커보드를 이용한 자동 타겟 인식 장치. |