| 번호 | 청구항 |
|---|---|
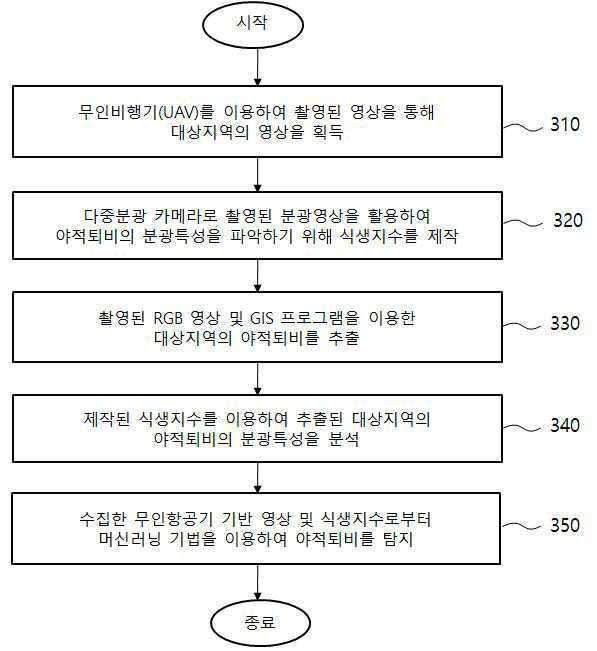
| 1 | 컴퓨터 장치에 의해 수행되는 야적퇴비 탐지 방법에 있어서, 무인항공기(UAV)를 이용하여 촬영된 영상을 통해 대상지역의 영상을 획득하는 단계; 다중분광 카메라로 촬영된 분광영상을 활용하여 야적퇴비의 분광특성을 파악하기 위해 식생지수를 제작하는 단계; 촬영된 RGB 영상 및 GIS 프로그램을 이용한 상기 대상지역의 야적퇴비를 추출하는 단계; 및 제작된 상기 식생지수를 이용하여 추출된 상기 대상지역의 야적퇴비의 분광특성을 분석하는 단계를 포함하고, 상기 대상지역의 야적퇴비를 추출하는 단계는, 기설정된 유형에 따라 야적퇴비를 분류하고, 상기 대상지역의 야적퇴비의 분광특성을 분석하는 단계는, 수집한 영상 및 상기 식생지수를 이용하여 데이터베이스를 구축하고, 야적퇴비 분류 유형에 따른 상기 식생지수 및 지표면 온도 특성을 분석하며, 수집한 영상들의 공간해상도가 상이하기 때문에 가장 해상도가 낮은 열적외 영상의 공간해상도로 동일하게 설정 후 폴리곤 백터 자료를 레스터(raster) 자료로 변환한 후, 대상지역의 경계에 따라 모든 영상의 크기를 수정하고, 각 영상를 1개 column(1×120,000)으로 각각 변환(reshape)하고, 각각의 column을 연결(concatenation)하여 데이터베이스를 구축하고, 야적퇴비 분류 유형에 따른 식생지수 및 지표면 온도 특성을 분석하는 야적퇴비 탐지 방법. |
| 2 | 제1항에 있어서, 상기 대상지역의 영상을 획득하는 단계는, 상기 무인항공기(UAV)에 RGB 카메라, 다중분광 카메라 및 열적외 카메라를 탑재하고, 대상지역의 범위를 고려하여 비행경로 및 고도를 설정하여 영상을 촬영하는 단계; 및 수집된 상기 영상을 정사영상으로 제작하는 단계를 포함하는, 야적퇴비 탐지 방법. |
| 3 | 제1항에 있어서, 상기 야적퇴비의 분광특성을 파악하기 위해 식생지수를 제작하는 단계는, NDVI(Normalized difference vegetation index), ENDVI(Enhance Normalized difference vegetation index), NGRDI(Normalized green red difference index), NDREI(Normalized difference red edge index), 및 GNDVI(Green NDVI) 중 적어도 어느 하나 이상의 식생지수를 제작하는 것을 특징으로 하는, 야적퇴비 탐지 방법. |
| 4 | 삭제 |
| 5 | 삭제 |
| 6 | 제1항에 있어서, 수집한 상기 무인항공기 기반 영상 및 상기 식생지수로부터 머신러닝 기법을 이용하여 야적퇴비를 탐지하는 단계를 더 포함하는, 야적퇴비 탐지 방법. |
| 7 | 제6항에 있어서, 상기 머신러닝 기법을 이용하여 야적퇴비를 탐지하는 단계는, 상기 무인항공기 기반 RGB, 식생지수, 열적외 영상과 SVM, DT(Decision tree), RF(Random forest) 및 k-NN 중 적어도 어느 하나 이상의 머신러닝 기법을 활용하여 야적퇴비를 탐지하는 것을 특징으로 하는, 야적퇴비 탐지 방법. |
| 8 | 제6항에 있어서, 상기 머신러닝 기법을 이용하여 야적퇴비를 탐지하는 단계는, 상기 야적퇴비의 분광특성을 이용하여 구축된 자료를 통해 SVM, DT(Decision tree), RF(Random forest) 및 k-NN 머신러닝을 분석하는 것을 특징으로 하는, 야적퇴비 탐지 방법. |
| 9 | 무인항공기(UAV)를 이용하여 촬영된 영상을 통해 대상지역의 영상을 획득하는 영상 수집부; 다중분광 카메라로 촬영된 분광영상을 활용하여 야적퇴비의 분광특성을 파악하기 위해 식생지수를 제작하는 식생지수 제공부; 촬영된 RGB 영상 및 GIS 프로그램을 이용한 상기 대상지역의 야적퇴비를 추출하는 야적퇴비 추출부; 및 제작된 상기 식생지수를 이용하여 추출된 상기 대상지역의 야적퇴비의 분광특성을 분석하는 야적퇴비 분광특성 분석부를 포함하고, 상기 야적퇴비 추출부는, 기설정된 유형에 따라 야적퇴비를 분류하고, 상기 야적퇴비 분광특성 분석부는, 수집한 영상 및 상기 식생지수를 이용하여 데이터베이스를 구축하고, 야적퇴비 분류 유형에 따른 상기 식생지수 및 지표면 온도 특성을 분석하며, 수집한 영상들의 공간해상도가 상이하기 때문에 가장 해상도가 낮은 열적외 영상의 공간해상도로 동일하게 설정 후 폴리곤 백터 자료를 레스터(raster) 자료로 변환한 후, 대상지역의 경계에 따라 모든 영상의 크기를 수정하고, 각 영상를 1개 column(1×120,000)으로 각각 변환(reshape)하고, 각각의 column을 연결(concatenation)하여 데이터베이스를 구축하고, 야적퇴비 분류 유형에 따른 식생지수 및 지표면 온도 특성을 분석하는 야적퇴비 탐지 장치. |
| 10 | 제9항에 있어서, 상기 영상 수집부는, 상기 무인항공기(UAV)에 RGB 카메라, 다중분광 카메라 및 열적외 카메라를 탑재하고, 대상지역의 범위를 고려하여 비행경로 및 고도를 설정하여 영상을 촬영하고, 수집된 상기 영상을 정사영상으로 제작하는 것을 특징으로 하는, 야적퇴비 탐지 장치. |
| 11 | 제9항에 있어서, 상기 식생지수 제공부는, NDVI(Normalized difference vegetation index), ENDVI(Enhance Normalized difference vegetation index), NGRDI(Normalized green red difference index), NDREI(Normalized difference red edge index), 및 GNDVI(Green NDVI) 중 적어도 어느 하나 이상의 식생지수를 제작하는 것을 특징으로 하는, 야적퇴비 탐지 장치. |
| 12 | 삭제 |
| 13 | 삭제 |
| 14 | 제9항에 있어서, 수집한 상기 무인항공기 기반 영상 및 상기 식생지수로부터 머신러닝 기법을 이용하여 야적퇴비를 탐지하는 머신러닝 기반 야적퇴비 탐지부를 더 포함하는, 야적퇴비 탐지 장치. |
| 15 | 제14항에 있어서, 상기 머신러닝 기반 야적퇴비 탐지부는, 상기 무인항공기 기반 RGB, 식생지수, 열적외 영상과 SVM, DT(Decision tree), RF(Random forest) 및 k-NN 중 적어도 어느 하나 이상의 머신러닝 기법을 활용하여 야적퇴비를 탐지하는 것을 특징으로 하는, 야적퇴비 탐지 장치. |