| 번호 | 청구항 |
|---|---|
| 1 | 컴퓨터 장치를 통해 구현되는 무인항공기 기반 다중분광영상을 활용한 소규모 저수지의 수생식물 탐지 방법에 있어서, 저수지의 수생식물 서식지의 분석을 위해 식생지수를 도출하는 단계; 및 기설정된 시기별 상기 식생지수의 평균값의 분석을 통해 수생식물의 식생지수 특성을 분석하는 단계를 포함하고, 무인항공기의 자율 비행을 통해 주기적으로 저수지에 대한 다중분광영상을 수집하는 단계; 및상기 식생지수 기반의 수생식물 서식지의 추출 결과와 실제 수생식물 분포와의 비교를 통한 추출 정확도를 검증하는 단계를 더 포함하고, 상기 다중분광영상을 식생지수로 변환한 후, 상기 식생지수를 기반으로 저수지의 수생식물 서식지를 분석하며, 상기 다중분광영상을 수집하는 단계는, 상기 무인항공기에 센서를 장착하여 각 분광 밴드별로 총 5개의 정사영상을 도출하고, 각 분광 밴드별 상기 정사영상을 활용하여 저수지의 수생식물 서식지를 분석하기 위해 식생지수를 분석하는 단계를 포함하고, 상기 식생지수를 도출하는 단계는,저수지의 수생식물 서식지 분석을 위해 NDVI (Normalized difference vegetation index), ENDVI (Extended normalized difference vegetation index), NGRDI Normalized green red difference index), GNDVI (green NDVI), NDREI(Normalized difference red edge index)를 포함하는 복수 개의 식생지수를 도출하는 단계를 포함하고,상기 추출 정확도를 검증하는 단계는, 무인항공기 기반 다중분광영상을 활용한 수생식물지역 분포 파악 시, 식생지수들을 비교 분석하여 식생지수를 도출하고, 시기별로 식생지수를 비교하여 수생식물의 서식지 변화를 분석하고, 상기 저수지의 수생식물 서식지에 대하여 미리 정해진 간격으로 폴리라인(polyline)을 설정한 후, 각 구간에 해당하는 밴드별 반사도와 식생지수에 대한 평균값을 산출하고, 상기 폴리라인에 따라 추출된 정보를 바탕으로 수생식물의 서식 유무에 따른 분광 반사도와 식생지수의 특성을 분석하는 단계를 포함하고,상기 무인항공기는, 회전익과 고정익이 병행되는 상기 무인항공기에 다중분광카메라를 탑재하여 영상정보를 취득하며, 이착륙 시에는 회전익 모드로 설정되어 수직으로 기체 이동이 가능하고, 비행 시에는 고정익 모드로 전환되어 수평으로 기체가 이동하여 영상정보를 취득하여 회전익 기체의 단점인 짧은 비행시간과 고정익 기체의 단점인 이착륙 공간 확보를 보완하며, 저수지 주변의 지형과 지물의 특성을 고려하여 설정된 비행 경로에 따라 무인항공기가 운용되는 수생식물 탐지 방법. |
| 2 | 삭제 |
| 3 | 삭제 |
| 4 | 제1항에 있어서,상기 다중분광영상을 수집하는 단계는, 상기 무인항공기의 운용 전 다중분광영상의 반사도 보정을 위해 반사패널을 촬영하는 것을 특징으로 하는, 수생식물 탐지 방법. |
| 5 | 삭제 |
| 6 | 삭제 |
| 7 | 삭제 |
| 8 | 제1항에 있어서,상기 추출 정확도를 검증하는 단계는, 상기 식생지수 기반의 수생식물 서식지의 추출 결과와 실제 수생식물 분포와의 비교 시, 표준편차가 다른 식생지수보다 큰 NDVI 및 GNDVI 중 적어도 어느 하나 이상의 식생지수를 도출한 후 추출 정확도를 검증하는 것을 특징으로 하는, 수생식물 탐지 방법. |
| 9 | 제1항에 있어서,상기 추출 정확도를 검증하는 단계는, 상기 식생지수 기반의 수생식물 서식지의 추출 결과와 실제 수생식물 분포와의 비교 시, 수생식물과 수면의 식생지수 값의 차이가 가장 큰 NDVI 및 GNDVI 중 적어도 어느 하나 이상의 식생지수를 도출한 후 추출 정확도를 검증하는 것을 특징으로 하는, 수생식물 탐지 방법. |
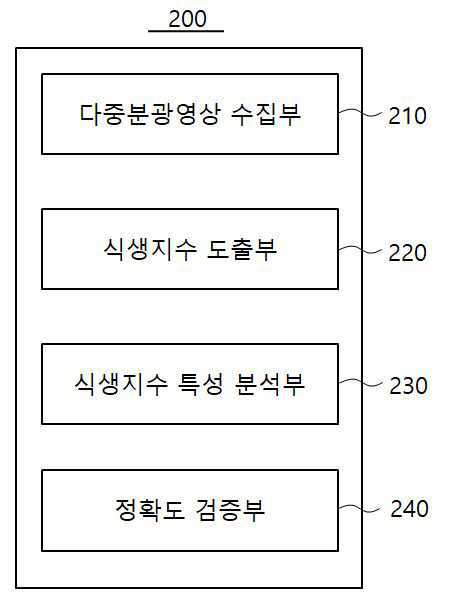
| 10 | 무인항공기 기반 다중분광영상을 활용한 소규모 저수지의 수생식물 탐지 시스템에 있어서, 저수지의 수생식물 서식지의 분석을 위해 식생지수를 도출하는 식생지수 도출부; 및 기설정된 시기별 상기 식생지수의 평균값의 분석을 통해 수생식물의 식생지수 특성을 분석하는 식생지수 특성 분석부를 포함하고, 무인항공기의 자율 비행을 통해 주기적으로 저수지에 대한 다중분광영상을 수집하는 다중분광영상 수집부; 및상기 식생지수 기반의 수생식물 서식지의 추출 결과와 실제 수생식물 분포와의 비교를 통한 추출 정확도를 검증하는 정확도 검증부를 더 포함하고, 상기 다중분광영상을 식생지수로 변환한 후, 상기 식생지수를 기반으로 저수지의 수생식물 서식지를 분석하며, 상기 다중분광영상 수집부는, 상기 무인항공기에 센서를 장착하여 각 분광 밴드별로 총 5개의 정사영상을 도출하고, 각 분광 밴드별 상기 정사영상을 활용하여 저수지의 수생식물 서식지를 분석하기 위해 식생지수를 분석하는 것을 포함하고,상기 식생지수 도출부는,저수지의 수생식물 서식지 분석을 위해 NDVI (Normalized difference vegetation index), ENDVI (Extended normalized difference vegetation index), NGRDI Normalized green red difference index), GNDVI (green NDVI), NDREI(Normalized difference red edge index)를 포함하는 복수 개의 식생지수를 도출하는 것을 포함하고,상기 정확도 검증부는, 무인항공기 기반 다중분광영상을 활용한 수생식물지역 분포 파악 시, 식생지수들을 비교 분석하여 식생지수를 도출하고, 시기별로 식생지수를 비교하여 수생식물의 서식지 변화를 분석하고, 상기 저수지의 수생식물 서식지에 대하여 미리 정해진 간격으로 폴리라인(polyline)을 설정한 후, 각 구간에 해당하는 밴드별 반사도와 식생지수에 대한 평균값을 산출하고, 상기 폴리라인에 따라 추출된 정보를 바탕으로 수생식물의 서식 유무에 따른 분광 반사도와 식생지수의 특성을 분석하는 것을 포함하고,상기 무인항공기는, 회전익과 고정익이 병행되는 상기 무인항공기에 다중분광카메라를 탑재하여 영상정보를 취득하며, 이착륙 시에는 회전익 모드로 설정되어 수직으로 기체 이동이 가능하고, 비행 시에는 고정익 모드로 전환되어 수평으로 기체가 이동하여 영상정보를 취득하여 회전익 기체의 단점인 짧은 비행시간과 고정익 기체의 단점인 이착륙 공간 확보를 보완하며, 저수지 주변의 지형과 지물의 특성을 고려하여 설정된 비행 경로에 따라 무인항공기가 운용되는수생식물 탐지 시스템. |
| 11 | 삭제 |
| 12 | 삭제 |
| 13 | 제10항에 있어서,상기 다중분광영상 수집부는, 상기 무인항공기의 운용 전 다중분광영상의 반사도 보정을 위해 반사패널을 촬영하는 것을 특징으로 하는, 수생식물 탐지 시스템. |
| 14 | 삭제 |
| 15 | 제10항에 있어서,상기 정확도 검증부는, 상기 식생지수 기반의 수생식물 서식지의 추출 결과와 실제 수생식물 분포와의 비교 시, 수생식물과 수면의 식생지수 값의 차이가 가장 큰 NDVI 및 GNDVI 중 적어도 어느 하나 이상의 식생지수를 도출한 후 추출 정확도를 검증하는 것을 특징으로 하는, 수생식물 탐지 시스템. |