| 번호 | 청구항 |
|---|---|
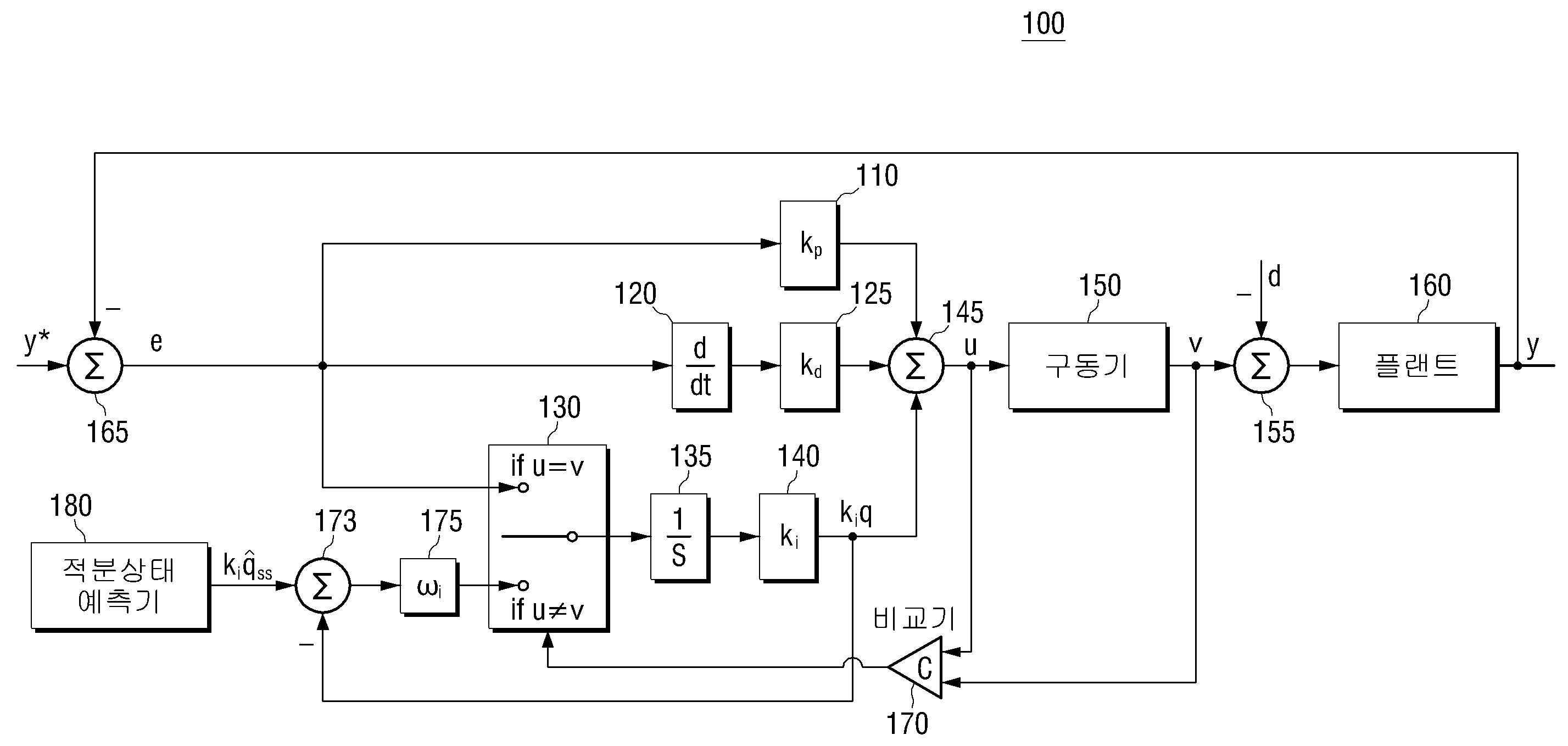
| 1 | 비례적분미분(PID) 제어기에 있어서, 선형영역 또는 포화영역으로 동작하는 구동기;플랜트의 기준값과 출력값의 오차에 대한 비례 연산을 수행하는 비례 제어기;상기 오차에 대한 미분 연산을 수행하는 미분 제어기;상기 구동기가 선형영역으로 동작하면, 상기 오차에 대한 적분 연산을 수행하는 적분 제어기;상기 구동기가 포화영역으로 동작하면, 상기 적분 제어기의 정상상태에서의 적분상태를 예측하는 적분상태 예측기; 및상기 예측된 적분 제어기의 정상상태에서의 적분상태를 이용하여, 상기 구동기가 선형영역에 진입하기 전에 상기 적분 제어기의 초기 상태가 선형영역의 적분상태 값이 되도록 하는 적분상태 초기화 루프;를 포함하는 비례적분미분 제어기. |
| 2 | 제1항에 있어서, 상기 적분상태 예측기는, 아래의 수학식을 이용하여 상기 적분 제어기의 정상상태에서의 적분상태를 예측하는 것을 특징으로 하는 비례적분미분 제어기:여기서,는 예측된 적분 제어기의 값, ki는 적분 제어기의 이득, 는 플랜트 출력 오차의 동특성, e는 플랜트의 출력 오차, b는 기설정된 입력 상수,는 고유 시정수, v는 플랜트의 입력이다. |
| 3 | 제1항에 있어서, 상기 적분상태 예측기는, 아래의 수학식을 이용하여 상기 적분 제어기의 정상상태에서의 적분상태를 예측하는 것을 특징으로 하는 비례적분미분 제어기:여기서,는 예측된 적분 제어기의 값, ki는 적분 제어기의 이득, b는 기설정된 입력 상수, 는 플랜트 출력 오차의 동특성, v는 플랜트의 입력이다. |
| 4 | 제1항에 있어서, 상기 적분상태 예측기는, 아래의 수학식을 이용하여, 상기 적분 제어기의 정상상태에서의 출력을 예측하여, 상기 적분 제어기의 정상상태에서의 적분상태를 예측하는 것을 특징으로 하는 비례적분미분 제어기: 여기서,는 예측된 적분 제어기의 출력, ki는 적분 제어기의 이득, 는 플랜트 출력 오차의 동특성, e는 플랜트의 출력 오차, b는 기설정된 입력 상수, 는 고유 시정수, v는 플랜트의 입력이다. |
| 5 | 제1항에 있어서, 상기 적분상태 예측기는, 아래의 수학식을 이용하여 상기 적분 제어기의 정상상태에서의 적분상태를 예측하는 것을 특징으로 하는 비례적분미분 제어기:여기서,는 예측된 적분 제어기의 출력, 는 플랜트 출력 오차의 동특성, b는 기설정된 입력 상수, v는 플랜트의 입력이다. |
| 6 | 제1항에 있어서, 상기 구동기의 입력과 상기 구동기의 출력을 비교하여 상기 구동기가 선형영역 또는 포화영역에서 동작하는지를 판단하는 비교기;를 더 포함하는 것을 특징으로 하는 비례적분미분 제어기. |
| 7 | 제6항에 있어서, 상기 비교기는, 상기 구동기의 입력과, 상기 구동기의 출력을 예측하여, 상기 구동기가 선형영역 또는 포화영역에 동작하는지를 판단하는 것을 특징으로 하는 비례적분미분 제어기. |
| 8 | 제1항에 있어서, 상기 구동기가 선형영역에서 동작하면, 상기 오차가 상기 적분 제어기에 입력되도록 하고, 상기 구동기가 포화영역에서 동작하면, 상기 적분 제어기가 상기 적분상태 초기화 루프에 연결되도록 제어하는 스위치;를 더 포함하는 것을 특징으로 하는 비례적분미분 제어기. |