| 번호 | 청구항 |
|---|---|
| 3 | 청구항 2항에 있어서,상기 다관절 보행다리는 2개의 관절부가 형성되어 수직 및 수평방향으로 회전 가능하되, 서로 평행하며 길이가 동일한 4절 링크구조를 가지며,상기 관절부와 구동모터의 연결부에는 한 쌍의 평기어로 구성된 감속기가 구비되는 것을 특징으로 하는, 음의 프아송비 구조를 이용한 생체모방 도마뱀 로봇. |
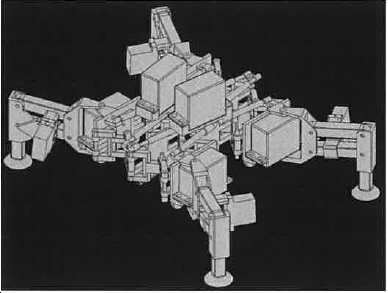
| 1 | 팽창 및 수축할 수 있도록 음의 푸아송비 구조를 이용한 생체모방 도마뱀 로봇에 있어서,다수의 링크부재로 결합되며, 소정의 푸아송비 패턴을 갖는 구조물로 이루어져 팽창 및 수축 가능한 몸체;상기 몸체의 상단 좌측 및 우측에 X자 형태로 각각 하나씩 결합되는 제어부재;상기 제어부재에 각각 4개씩 구비되어 상기 몸체의 팽창 및 수축시키는 실린더 및 서보모터; 및상기 몸체의 좌측 및 우측에 각각 두 개씩 4절링크 구조로 구비되며, 서보모터 및 감속기를 포함하는 다관절 보행다리;를 포함하고,상기 몸체는 PLA 소재로 구성되되, 상기 몸체의 전방에는 카메라 및 초음파 카메라가 구비되는 것을 특징으로 하는, 음의 프아송비 구조를 이용한 생체모방 도마뱀 로봇. |
| 2 | 청구항 1항에 있어서,상기 링크부재는 제1링크부, 제2링크부 및 제3링크부로 구성되고,상기 제1링크부 및 제2링크부와 제3링크부의 길이 비율는 1:2.2로 이루어지며,상기 각각의 링크부는 핀 연결되되, 핀 연결부에는 펼침각을 제한하는 스토퍼가 구비되고,상기 몸체는: 상기 구동모터의 가동축과 구동모터의 일측에 각각 연결되며 신축 가능한 슬라이드 구조물; 및 상기 슬라이드 구조물 신축 시 복원력을 제공하는 압축 코일 스프링;을 포함하고,상기 소정의 푸아송비 패턴을 갖는 구조물 및 상기 제3링크부를 연결하는 핀 연결부에는 회전각을 16 내지 17도로 제한하는 스토퍼가 구비되는 것을 특징으로 하는, 음의 프아송비 구조를 이용한 생체모방 도마뱀 로봇. |