| 번호 | 청구항 |
|---|---|
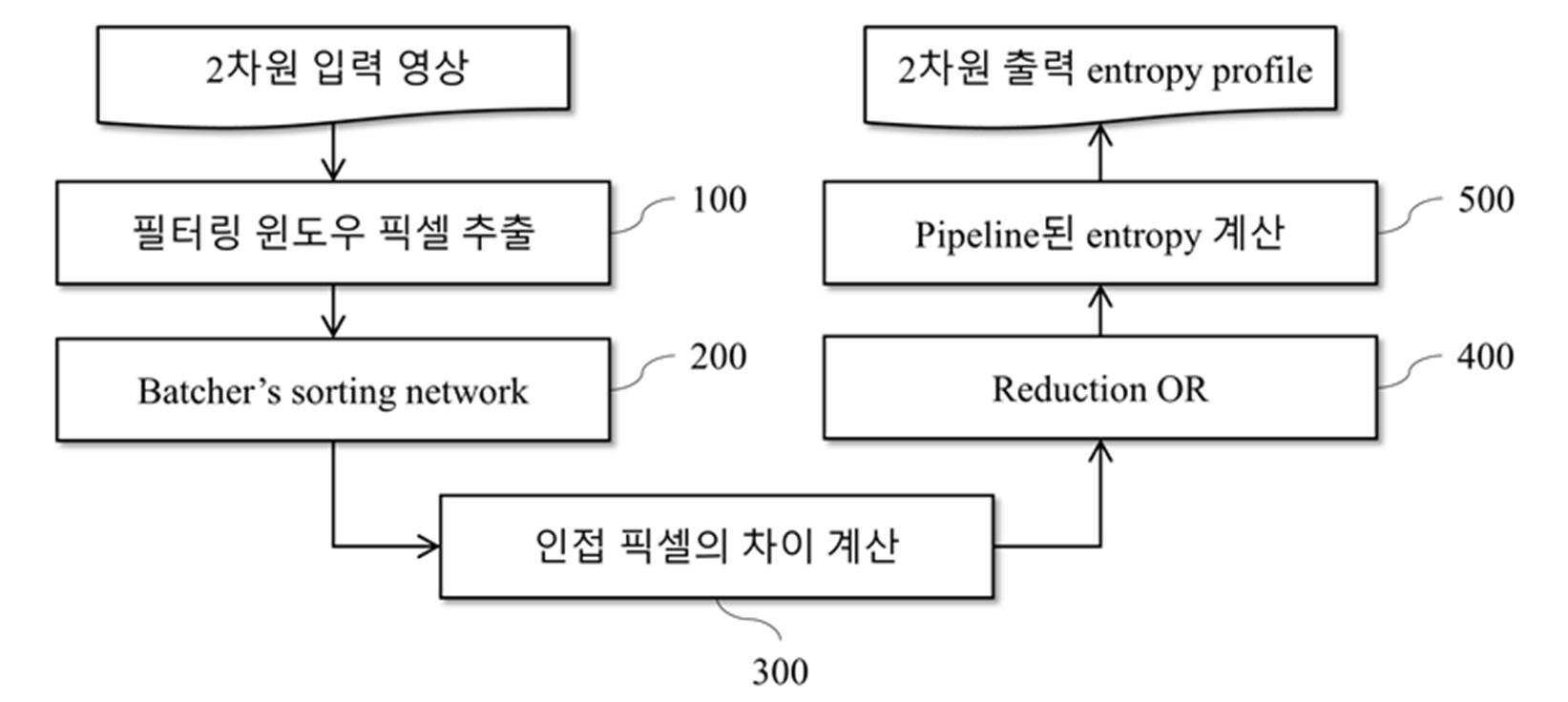
| 1 | 필터링 윈도우 크기에 따라 라인 메모리(line memory) 및 버퍼 레지스터(buffer register)로 윈도우 속의 픽셀을 추출하는 제 1 단계;바이쳐 정렬 네트워크(Batcher's sorting network)로 추출한 픽셀을 정렬하는 제 2 단계;정렬된 픽셀의 인접 차이를 계산하는 제 3 단계; 상기 제 3 단계에서 연산된 차이값을 1비트로 표현하기 위한 reduction OR 단계를 수행하는 제 4 단계; 및 파이프 라인(pipeline)된 entropy 계산 단계를 수행하는 제 5 단계; 를 포함하는 것을 특징으로 하는 엔트로피 필터의 구현 방법. |
| 2 | 청구항 1에 있어서, 상기 제 1 단계는, 입력 영상 데이터가 타이밍 신호(horizontal active video 및 vertical active video)와 같이 입력되면, 크기가 N-by-N인 필터링 윈도우 속의 모든 (N×N)(N은 1 이상의 자연수 중 홀수로서 3~15임)개의 픽셀들을 추출하기 위해서 먼저 (N-1)개의 라인 메모리(line memory)(101)를 사용하는 것을 특징으로 하는 엔트로피 필터의 구현 방법. |
| 3 | 필터링 윈도우 크기에 따라 라인 메모리(line memory) 및 버퍼 레지스터(buffer register)로 윈도우 속의 픽셀을 추출하는 단계를 수행하는 추출 모듈(100);바이쳐 정렬 네트워크(Batcher's sorting network)로 추출한 픽셀을 정렬하는 단계를 수행하는 정렬 모듈(200);정렬된 픽셀의 인접 차이를 계산하는 단계를 수행하는 차이 계산 모듈(300);차이 계산 모듈(300)에서 연산된 차이값을 1비트로 표현하기 위한 reduction OR 단계를 수행하는 인접 차이 표현 모듈(400); 및파이프 라인(pipeline)된 entropy 계산 단계를 수행하는 entropy 계산 모듈(500); 을 포함하는 것을 특징으로 하는 엔트로피 필터의 구현을 위한 하드웨어 장치. |